Beneficiar: GRUPUL ŞCOLAR
INDUSTRIAL ,,ŞTEFAN PROCOPIU’’
VASLUI
Proiect nr: LLP –
Ldv/IVT/2010/RO/039
SISTEMELE
DE LOCOMOŢIE ALE ROBOŢILOR
MOBILI ŞI INDUSTRIALI- ORIENTAREA ROBOTULUI ÎN ZONA DE INTERVENŢIE
SUPORT DE CURS
GLOSSAR
TEHNIC
MINIGHID
DE CONSTRUCŢIE A ROBOŢELULUI MOBIL ARO 1

PRODUS
FINAL CREAT CU SPRIJINUL FINANCIAR AL COMISIEI EUROPENE PRIN PROGRAMUL DE
INVAŢARE PE TOATĂ DURATA VIEŢII/LEONARDO DA VINCI – MOBILITĂŢI
DE ELEV
|
Autorii suportului de
curs: Prof.
Mihaela APOPUŢOAIE
Prof. Mariana BACOŞCĂ-BICĂ Prof. Maricel BEJENARU
Prof. Ana-Cristiana BOTAN Prof.
Silvia BÎRCĂ Prof.
Areta DIACONU Prof. Doina MAZGA
Prof. Aristotel ONCIU
Ec. prof. Mihaela SOROCEANU Tehnoredactare:
Prof. Bacoşcă-Bică Mariana Prof. Diaconu Areta Prof. Bîrcă Silvia
|
Notă: Conţinutul acestui document este responsabilitatea exclusivă a Grupului Şcolar Industrial ,,Ştefan Procopiu’’ Vaslui şi nu reprezintă punctul de vedere al Comisiei Europene şi al Agenţiei Naţionale pentru comunicare în domeniul Educaţiei şi formării profesionale.
Editura
MEDIA SIND
Str. Donici, nr. 2, Tel./Fax: 0235 315
008; 0723 359148,
E-mail: sindmedia@yahoo.com
ISBN:
Vaslui, August 2011

CUPRINS
|
Argument..................................................................................................................................... |
5 |
|||
|
Capitolul I. GLOSSAR TEHNIC............................................................................................ |
7 |
|||
|
|
1.1. In limba română........................................................................................................... |
7 |
||
|
|
1.2. In limba engleză.......................................................................................................... |
7 |
||
|
|
1.3. In limba germană......................................................................................................... |
7 |
||
|
Capitolul II. MINIGHID DE CONSTRUCŢIE A ROBOŢELULUI MOBIL.................... |
17 |
|||
|
|
2.1. Definiţii ale roboţilor................................................................................................... |
17 |
||
|
|
2.2. Clasificarea roboţilor................................................................................................... |
18 |
||
|
|
2.3. Caracteristici ale roboţilor........................................................................................... |
18 |
||
|
|
2.4. Tipuri de roboţi:........................................................................................................... |
19 |
||
|
|
|
2.4.1. Roboţi cu braţ articulat(cu 5 sau 6 articulaţii)................................................... |
19 |
|
|
|
|
2.4.2. Roboţi SCARA................................................................................................. |
22 |
|
|
|
|
2.4.3. Roboţi tip portal................................................................................................ |
23 |
|
|
|
|
2.4.4. Roboţi mobili................................................................................................. |
24 |
|
|
|
|
|
2.4.4.1. Definire ................................................................................................... |
24 |
|
|
|
|
2.4.4.2. Problemele unui robot mobil................................................................... |
24 |
|
|
|
|
2.4.4.3. Caracteristici de funcţionare specifice.................................................... |
24 |
|
|
|
|
2.4.4.4. Caracteristici comune ale roboţilor mobili.............................................. |
25 |
|
|
|
|
2.4.4.5. Categorii de roboţi mobili....................................................................... |
25 |
|
|
|
|
2.4.4.6. Roboţi mobili pe roţi............................................................................... |
26 |
|
|
|
|
2.4.4.7. Roboţi mobili pe şenile........................................................................... |
27 |
|
|
|
|
2.4.4.8. Roboţi mobili cu picioare........................................................................ |
27 |
|
|
|
|
2.4.4.9. Roboţi LEGO.......................................................................................... |
28 |
|
|
|
2.4.5. Structuri speciale de roboţi................................................................................ |
29 |
|
|
|
|
2.4.6. End-effectori..................................................................................................... |
29 |
|
|
|
|
2.4.7. Gripper-e........................................................................................................... |
29 |
|
|
|
2.5. Arii de aplicabilitate ale roboţilor............................................................................... |
32 |
||
|
|
2.6. Construcţia roboţelului mobil ARO 1......................................................................... |
38 |
||
|
In loc de concluzii....................................................................................................................... |
64 |
|||
|
Anexe.......................................................................................................................................... |
67 |
|||

ARGUMENT
Mecatronica s-a impus astăzi în viaţa reală din ce în ce mai mult în şcoli pentru a putea fi studiată şi tratată corespunzator.
Drumul evoluţiei mecatronicii a fost deschis de tehnologiile electronice de amplificare a semnalelor.
Dezvoltarea electronicii de putere a generat flexibilitate şi posibilitatea de a separa zona semnalelor de zona actuatorilor.
Integrarea componentelor hardware rezultă din proiectarea sistemelor mecatronice privite ca fiind sisteme mecanice ce includ senzori, actuatori şi calculatoare cu programe aferente.
Astfel,
mecatronica este o specializare care ocupă un loc important în
programul educaţional al Grupului Şcolar Industrial ,,Ştefan
Procopiu’’.
Deşi robotul este un produs mecatronic,
programa şcolară a acestei
specializări nu prevede conţinuri referitoare la structura
roboţilor mobili, sistemul de locomoţie, comanda roboţilor
mobili, ci doar conţinuturi aferente roboţilor industriali.
Realizând o cercetare proprie privind
perceptia şi aşteptările elevilor de la clasele cu
specializările mecatronica, tehnician proiectant CAD, operator tehnică de calcul,
telecomunicaţii, s-a observat că
aceştia erau foarte interesaţi
să-şi formeze şi să-şi dezvolte aptitudini în
domeniul roboticii în conformitate cu nivelul atins de tehnica şi
tehnologia modernă.
Astfel în anul şcolar 2010-2011, Grupul
Şcolar Industrial ,,Ştefan Procopiu’’ Vaslui a fost beneficiarul
Proiectului de mobilităţi Leonardo da Vinci IVT intitulat ,,Sistemele
de locomoţie ale roboţilor mobili şi industriali-Orientarea
robotului în zona de intervenţie’’
(ORMI), (nr. LLP-LdV/IVT/2010/RO/039).
Din echipa de proiect au făcut parte un
număr de 7 profesori şi 14 elevi(7 fete si 7 băieţi) de la
clasele a-XI-a specializările vizate de cercetarea proprie, aflaţi în
perioada formării şi achiziţionării de competenţe
şi abilităţi în domeniul tehnologiei de vârf..
Profesorul
coordonator al proiectului a fost
doamna profesor Mihaela Apopuţoaie.
Mobilitatea a vizat satisfacerea nevoilor de
pregătire practică în domeniul mecatronicii, deoarece:
- în
şcoala noastră nu există echipamentele necesare
- elevii
învaţă cel mai bine când consideră că învăţarea corespunde
nevoilor lor.
Selecţia grupului ţintă a fost
realizată conform criteriilor menţionate în proiect.
Derularea plasamentului s-a realizat în perioada 9
mai-29 mai 2011 şi a coincis cu cele 90 de ore de pregătire
practică aferente modulului ,,Circuite electronice’’conform programei
şcolare in vigoare pentru clasele a-XI-a ruta directă,
specializările din aria acoperită de proiect.
După participarea la acest stagiu de
pregătire practică elevii sunt capabili:
·
Să identifice părţile componemte ale
unui robot
·
Să cunoască limbajul PLC pentru programarea
roboţilor
·
Să
identifice tipuri de circuite electronice
·
Să
conecteze circuite electronice în echipamente şi
instalaţii
·
Să
creeze şi să menţină relaţii profesionale
Produsul final al
proiectului a constat în realizarea
acestui ghid practic realizat după următoarea
structură : glossar tehnic cu termeni tehnici din domeniul
roboţilor explicaţi în limba română, engleză, germană şi minighid de construcţie
a roboţelului mobil care să cuprindă atât cunoştinţe
teoretice privind roboţii mobili cât şi etapele de studiu şi de
realizare a robotului mobil ,,ARO 1’’.
Proiectul a
reprezentat şi un schimb de experienţă pentru profesori care prin intermediul profesorului coordonator
au avut posibilitatea să afle informaţii noi în domeniul roboticii
şi să cunoască structura
de bază a unei curricule aplicată într-o ţară
europeană ca Germania în care roboţii sunt utilizaţi în toate
domeniile şi care ocupă un loc important în lume în ceea ce
priveşte numărul de roboţi utilizaţi.
Capitolul I. GLOSSAR TEHNIC
|
1.1. Limba romana |
1.2. Limba engleza |
1.3. Limba germana |
|
A robotiza: - a dota cu sisteme mecanice, informatice sau mixte, cu roboti procesul de producţie în scopul de a înlocui omul în operaţii repetabile sau vătămătoare |
To
robotize: - to equip with mechanical, computer or mixed systems, with robots
the production process in order to replace the man in repeated or harmful operations |
Robotisieren:-
die Produktion mit mechanischen, Computer oder gemischten Systemen, mit Robotern ausrüsten, um die Menschen in wiederholten oder schädlichen
Operationen zu ersetzen |
|
Articulaţie: - legătura între două sau mai multe corpuri solide, care permite rotaţia lor relativă în jurul uneia sau a două axe sau în jurul unui punct |
Joint: - the connection between two or more solid
bodies, allowing their relative
rotation around one or two axes or
around a point |
Gelenk: - die
Verbindung zwischen zwei oder mehr feste Körper, die ihre relative Drehung um
eine oder zwei Achsen oder um einen Punkt erlaubt |
|
Automatizarea: - ştiinţa care se ocupă cu comanda şi controlul sistemelor |
The automation: - the
science that deals with the command and control of systems |
Die Automation: - die Wissenschaft, die sich mit der Steuerung und Kontrolle von Systemen beschäftigt |
|
Automatul programabil: - cel mai
general echipament de automatizare cu microprocesor |
Programmable automaton: - the most general microprocessor automation equipment |
Programmierbarer Automat: - die allgemeinste Automatisierungsausrüstung mit
Mikroprozessor |
|
Celula de fabricaţie: -
celula de producţie la care controller-ul preia controlul tuturor
componentelor din care este alcătuită |
The manufacturing
cell: - the production cell in which the controller takes control of all
components that make it up |
Die Fertigungszelle: - die Produktionzselle,
in der die Steuerung (der Controller) die Kontrolle aller konstitutiven
Komponenten übernimmt |
|
Componenta mecanică: - asigură suportul fizic pentru transmiterea de forţe si momente în vederea realizării de mişcări cu viteze şi acceleraţii controlate |
The mechanical component: - it provides
physical support for the transmission
of forces and moments
in order to achieve movements
with controlled speeds and accelerations |
Die Mechanische Komponente: - sie sichert die physische Unterstützung für die Übertragung von Kräften und Momenten,
um Bewegungen mit kontrolliertern Geschwindigkeiten
und Beschleunigungen zu erreichen |
|
Componente electronice: - senzori şi traductoare şi diferite circuite electronice de forţă sau de procesare semnale incluzând suportul fizic de transmitere a semnalelor în comunicaţii |
Electronic components: - sensors and transducers, and various power or signal-processing
electronic circuits including the signal transmission medium in communications |
Elektronische Komponenten: - Sensoren und Wandler, sowie verschiedene elektronische
Leistungskreise oder Signalverarbeitungskreise einschließlich
des Signalübertragungsmediums
in der Kommunikation |
|
Componente software: - include
toată gama de produse de programare, uzual formată din sistem de
operare, drivere si programe de aplicaţie |
Software components: - they include the full range of programming products, usually consisting of
operating system, drivers and application programming |
Software-Komponenten: - sie
umfassen die gesamte Palette von Programmierung-Produkten, in der Regel von
Betriebssystem, Treiber und Anwendungsprogrammierung |
|
Componentele informatice: -
reprezintă cel puţin un controller cu procesor în care este
înglobat un program software realizat de utilizator şi /sau de firma
care a construit controller-ul |
The computer
components: - they mean at least one controller with processor in
which is embedded a software program developed by the user and / or the company that built the controller |
Die Computer-Komponenten: - sie bedeuten mindestens eine Steuerung (einen
Controller) mit Prozessor, in dem ein Software-Programm
eingebettet ist. Das Software-Programm ist vom Benutzer und / oder von der Firma gemacht, die den Controler entwickelt hat |
|
Comunicaţia in reţea: - posibilitatea subsistemelor din cadrul sistemelor mari care funcţionează independent, dar care trebuie sa schimbe informaţii pentru a se coordona cu tot ansamblul |
The network communication: - the possibility of sub-systems inside the big systems that
work independently, but must share information to coordinate with
the whole system |
Die Netzwerkkommunikation: - die Möglichkeit der Sub-Systeme innerhalb der
großen Systeme, die unabhängig voneinander arbeiten,
aber die Informationen austauschen müssen, um sich mit dem ganzen System zu koordinieren |
|
Configuraţia articulaţiilor: -numărul gradelor de libertate |
The joint configuration: - the number of degrees of freedom |
Die
Gelenk-Konfiguration: - die Anzahl der Freiheitsgrade |
|
Controller: - circuit complex şi logica aferentă operării în condiţii optime a unui echipament periferic |
Controller: - complex circuit
and the logic assignable to a peripheral operating under optimum conditions |
Steuerung /
Controller: - zusammengesetzter Stromkreis und die Logik entsprechend einem
Peripheriegerät, der unter optimalen Bedingungen arbeitet |
|
Controller-ul unui robot industrial: - este interfaţa dintre operator şi componentele mecanice şi electrice ale robotului |
An industrial robot
controller: - it is the interface between the operator and the mechanical and
electrical components of the robot |
Ein Industrieroboter
Steuerung: - es ist die Schnittstelle zwischen dem Betreiber / Operator und den
mechanischen und elektrischen Komponenten des Roboters |
|
Controlul mişcărilor: - analiza permanentă sau periodică a mişcării pentru a urmări mersul şi ei pentru a lua măsuri de îmbunătăţire |
The motion
control: - the permanent or periodic motion analysis to track its progress and
to take measures for improvement |
Bewegungskontrolle: - die
ständige oder zeitweilige Bewegungsanalyse, um ihre Fortschritte zu verfolgen und Maßnahmen zur Verbesserung ergreifen |
|
Counter: - numărător |
Counter: -equipment that counts |
Counter / Zähler: - Ein
Gerät, das zählt |
|
Dispozitive de alimentare: - mecanisme cu un program de mişcare fix. Traiectoriile şi unghiurile de mişcare pot fi modificate mecanic. Sunt prevăzute cu mâini mecanice(gripper-e) pentru acţiuni de mânuire a obiectelor |
Feeders: - mechanisms with a fixed program of movement. Motion trajectory
and angles can be modified mechanically. They are provided
with mechanical hands (grippers) for
actions of object handling |
Zubringer / Feeders: - Mechanismen mit einem festen Bewegungsprogramm. Trajektorien und Winkel der Bewegung können mechanisch verändert werden. Sie sind mit mechanischen Hände (Greifer) für Aktionen von
Gegenstand-Handhabung ausgestattet |
|
Dispozitive: - ansamblu de piese legate între ele într-un anumit fel şi care îndeplineşte o funcţie bine determinată într-un sistem tehnic |
Devices: - set of
parts linked in
a certain way and which have a well determined function
in a technical system |
Geräte: - eine Gesamtheit von Teilen, die in einer
bestimmten Weise verbunden sind, und die eine gut
bestimmte Funktion in einem technischen System
erledigen |
|
Element de sesizare: - acea
parte a senzorului care detectează şi converteşte mărimea
măsurată, dar nu permite o utilizare imediată a semnalului,
deoarece este necesară o procesare a acestuia |
Sensing element: - that part of the sensor that detects and converts
the measured size, but does not allow immediate
use of the signal, because it
is necessary its processing |
Messfühler: - jenes Stück des Sensors, das die gemessene Größe
entdeckt und transformiert, aber
eine sofortige Benutzung des Signals
nicht erlaubt, weil es notwendig seine Verarbeitung is |
|
Flexibilitatea: -
posibilitatea utilizării unui aparat în mai multe scopuri |
Flexibility: - the possibility of using a device for more purposes |
Flexibilität: - Die Möglichkeit der Verwendung eines Geräts
für mehrere Zwecke |
|
Function block diagram: - diagrama bloc |
Function block diagram: - block diagram |
Function
block diagram: - Blockdiagramm |
|
Grade de libertate: - specifică numărul de posibilităţi independente de a mişca un robot, relativ la un sistem de coordonate fix |
Degrees of freedom: - they specify the number of independent possibilities to move a robot, relatively to a fixed coordinate
system |
Freiheitsgrade: - sie spezifizieren
die Anzahl der unabhängigen Möglichkeiten, um einen Roboter zu bewegen,
relativ zu einem festen Koordinatensystem |
|
Gripper - e cu vacuum: - prinderea cu vacuum este indicată în manipularea pieselor cu suprafaţa netedă |
Vacuum Grippers: - the vacuum attachment is
suitable for handling parts with smooth
surface |
Vakuumgreifer: - Die Vakuum-Anlage ist geeignet für die Handhabung der Teile mit glatter Oberfläche |
|
Hardware: - structura fizica a unui sistem de calcul şi diverse periferice; echipament propriu-zis; dispozitivele tehnologiei actuale, placa de bază, circuitele integrate, firele conductoare, bateria |
Hardware: - the
physical structure of a computer system and various peripherals; proper equipment; present-day technology
devices, motherboard, integrated circuits, conductor wires, battery |
Hardware: - die physikalische Struktur eines
Computersystems; verschiedene Peripheriegeräte;
die heutige Technologie Geräte, die Hauptplatine, die integrierte
Schaltkreise, die Leitungsdrähte, Batterie |
|
Instruction List: - lista de
instrucţiuni |
Instruction List: - list of instructions |
Anweisungsliste: - Liste mit
Anweisungen |
|
Interconexiuni: - legatura
stabilită între mai multe reţele electrice prin intermediul unor
linii de transport de energie electrică |
Interconnections: - the
connection established between several power networks by means of electricity
transmission lines |
Zusammenschaltungen: - die
Verbindung zwischen mehreren Stromnetzen durch Stromleitungen aufgebaut |
|
Interfaţa: - dispozitiv care converteşte semnalele electronice în aşa fel, încât două aparate sau sisteme să poată comunica între ele |
The interface: - device
that converts electronic
signals in such a way that two devices
or systems can communicate
with each other |
Die Schnittstelle: - Gerät, das die elektrische Signale umwandelt in einer
Weise, dass zwei Geräte oder Systeme
können miteinander kommunizieren |
|
IRL: - Industrial Robot Language- limbaj de programare in mod text pentru programarea robotilor industriali |
IRL: - Industrial Robot
Language |
IRL: - Industrieroboter-Sprache |
|
Ladder diagram: - limbaj
grafic |
Ladder diagram: - graphic
language |
Ladder diagram: - grafische
Sprache |
|
Limbaje de programare
conform standardelor IEC 1131-3 |
Programming languages according to standards IEC 1131-3 |
Programmiersprachen
gemäß den Normen IEC 1131-3 |
|
Mână mecanică/ gripper-e: - fixează mecanic poziţia şi orientarea obiectului apucat, relativ la braţul robotului |
The mechanical
hand / grippers: - fasten(s) mechanically the position and
orientation of the seized object, relating to the robot arm |
Die mechanische Hand / Der mechanische Greifer: - befestigt mechanisch die Position und Orientierung des
angefassten Gegenstandes, in
Hinsicht auf den Roboterarm |
|
Manipulatoare simple: - dispozitive de
mişcare controlate manual pentru diverse operaţii de manevrare |
Simple manipulators: - motion
devices controlled manually for different handling operations |
Einfache
Manipulatoren: - Motion Geräte, manuell gesteuert, für unterschiedliche Handhabung Operationen |
|
Manipulator: - aparat cu care se apucă şi se manipulează piesele(calde) intr-o uzină sau într-un atelier |
Manipulator: - device that
grabs and manipulates (hot) pieces in a plant
or workshop |
Manipulator: - Gerät, das
greift und manipuliert die (heiße) Teile in einem Werk oder einem Werkstatt |
|
Mecatronică: - disciplină tehnică aflată la interferenţa dintre electronică, mecanică şi informatică. Din fr. Mecatronique, engl. mecatronics. Tehnologia care face legătura între mecanică, electronică şi tehnologia informaţiei în scopul asigurării integrării şi functionalităţii componentelor, modulelor, utilajelor şi sistemelor. Ştiinţa maşinilor inteligente |
Mechatronics: - the technical science located at
the crossroads of electronics,
mechanics and computer science. From fr. mecatronique,
engl. mecatronics. The technology that connects the mechanical, electronic and information
technology in order to ensure integration
and functionality of
components, modules, equipment and
systems. The science of intelligent machines |
Die Mechatronik: - die technische
Fachrichtung, die an der Kreuzung
von Elektronik, Mechanik und
Informatik liegt. Von fr. mecatronique, engl. mecatronics. Die Technologie,
die Mechanik, Elektronik und Informationstechnologie in
sich vereint, um die Integration
und Funktionalität der Komponenten,
Module, Geräte und Systeme sicherzustellen. Die Wissenschaft der intelligenten Maschinen |
|
MELFA: - BASIC III si IV -
Limbaje de programare, de nivel înalt, pentru roboţi industriali |
MELFA: - BASIC
3 and 4 –
programming languages of high level
for industrial robots |
MELFA: - BASIC 3 und 4 - Programmiersprachen
von hohem Niveau für Industrieroboter |
|
Modularitatea: - posibilitatea de a adăuga sau a elimina cu uşurinţă, părţi componente ale unui sistem |
The modularity: - the ability to add or remove easily the component parts of a system |
Die Modularität: - die
Fähigkeit, hinzuzufügen oder zu entfernen einfach die Bestandteile eines
Systems |
|
MRL: - limbaj de programare folosit de firma Mitsubish pntru programarea robotilor sai industriali din primele generatii |
MRL: - Mitsubishi Robot Language |
MRL: - Mitsubishi Roboter Sprache |
|
Planificarea mişcărilor: - activitate de
programare a mişcărilor |
Planning movements: - programming movement activity |
Planung der
Bewegungen: - Aktivität von Bewegungsprogrammierung |
|
Precizie de poziţionare: - faptul de a fi precis, calitatea de a măsura, de a determina sau de a indica precis, exactitate |
Positioning accuracy: - being
accurate; the quality
of precisely measuring, determining or indicating; accuracy |
Positioniergenauigkeit: - die Richtigkeit, die Qualität der Messung, Ermittlung oder
des präzisen Zeigens; Genauigkeit |
|
Program PLC: - Programable
Logic Controller, are la bază un microprocesor şi un program
realizat pe calculator. Programarea unui PLC se face cu ajutorul unui
calculator, mai rar cu ajutorul unei console de programare specială. Un
PLC poate comunica cu alte controller-e utilizând reţele Fieldbus sau
Ethernet. Prin comunicare între un PLC şi un calculator se deschide
calea către aplicaţii de vizualizare a proceselor, adică de
afişare pe calculator, sub forma grafică şi în simboluri
uşor de înţeles, a stărilor procesului de producţie |
Programme PLC: - Programmable Logic Controller is
based on a microprocessor and a
computer developed program. Programming a PLC is
done using a computer, more often using a special programming
console. A PLC
can communicate with other controllers using the
Fieldbus or Ethernet networks. The communication between
a PLC and a computer opens the
way towards applications of
visualization of processes, namely of displaying
production process states on computer,
in the shape of graphics and easy
to understand symbols |
Programm PLC: - Programmable Logic
Controller basiert auf einem
Mikroprozessor und einem Computer entwickeltes Programm. Die Programmierung
eines PLC erfolgt mit einem Computer, seltener mit einer speziellen Programmierung Konsole. Ein PLC kann
mit anderen Steuerungen / Controllers über
die Feldbus-oder Ethernet-Netzwerken kommunizieren. Die Kommunikation zwischen
einem PLC und einem Computer öffnet den Weg für Anwendungen
der Visualisierung von Prozessen, nämlich der Darstellung der Zustände
des Produktionsprozesses am Computer, in Form von Grafiken und leicht verständlichen Symbolen |
|
Programare in mod text: - face apel la
utilizarea unor limbaje de programare de nivel înalt, specifice
roboţilor. Realizarea oricărui program necesită folosirea unui
sistem de dezvoltare al programelor |
Programming in the
text mode: - it calls for the use of high-level programming
languages, specific to robots. The achievement of any program
requires the use of a system of developing programs |
Programmierung in den Text-Modus: - fordert den Einsatz von High-Level-Programmiersprachen,
speziell für Roboter. Die Leistung eines jeden Programms erfordert die Verwendung eines Systems von
der Entwicklung von Programmen |
|
Programare manuală: - stabilirea de
puncte de mişcare prin limitatori(opritori) la nivelul axelor.
Programarea manuală se foloseşte numai pentru dispozitive de
alimentare/evacuare |
Manual programming: - the setting of move points through limiting devices (check)
at the level of the axes. Manual programming is used only for
input / output devices |
Manuelle Programmierung: - die Festsetzung von Bewegungspunkten durch
die Begrenzungseinrichtungen der Geräte (check)
auf der Ebene der Achsen. Manuelle Programmierung wird nur für Input / Output-Geräten verwendet |
|
Programare master-slave: - este
comparabilă cu programarea teach-in direct, dar în acest caz operatorul
nu mişca robotul în mod direct, ci foloseşte un model
miniatură al robotului model |
Master-slave
programming: - it is comparable to direct teach-in programming, but in this case
the operator does not move the robot directly, but uses a miniature model of
the model robot |
Master-Slave-Programmierung: - sie ist vergleichbar mit
direkter Teach-In-Programmierung,
aber in diesem Fall bewegt dem Betreiber der Roboter nicht direkt, sondern er verwendet ein Miniatur-Modell des Modells-Roboter |
|
Programare offline: -
suportă în general numai comenzi pentru mişcări |
Offline programming: - it
generally handles only orders for movements |
Offline-Programmierung: -
in der Regel übernimmt sie nur
Aufträge für Bewegungen |
|
Programarea în mod grafic: -
utilizează sisteme CAD în scopul de a modela geometric obiectele
aplicaţiei. Aceste informaţii geometrice se folosesc de programe
specializate pentru a genera mişcări ale robotului pe anumite
traiectorii |
The graphical programming: - it uses
CAD systems in
order to model the objects of application geometrically.
This geometric information
is used by specialized programs
to generate movements of the robot on certain trajectories |
Die grafische Programmierung: - sie verwendet CAD-Systemen, um die Objekte
der Anwendung geometrisch
zu modellieren. Diese geometrische Informationen
werden von spezialisierten Programmen verwendet, um Bewegungen des Roboters
auf bestimmten Bahnen zu generieren |
|
Programarea teach-in: - este subdivizată în trei metode: teach-in direct, programare master-slave şi teach-in indirect |
The teach-in
programming: - it is subdivided into three methods: direct teach-in, master-slave
programming and indirect teach-in |
Die Teach-in Programmierung: - sie ist in drei Methoden unterteilt:
direkte Teach-in, Master-Slave-Programmierung und indirekte
Teach-in |
|
Programarea: - dispunerea
cronologică a unor mişcări, operaţiuni, sau
activităţi astfel încât în finalul perioadei să se realizeze o
stare posibilă a unui sistem |
The programming: - chronological arrangement of some movements, operations or activities so that
at the end of the period a possible state of a
system should be achieved |
Die Programmierung: - chronologische Anordnung von einigen Bewegungen, Arbeitsgänge oder Aktivitäten,
so dass am Ende der Periode einen möglichen Zustand eines Systems realisiert wird |
|
Programe SCADA: - denumirea
prescurtată a programelor software pentru Supervisory Control And Data
Acquisition |
SCADA programs: - the short
name of the software programs for
Supervisory Control and Data Acquisition |
SCADA-Programme: - der Kurzname der Software-Programme für
Supervisory Control and Data Acquisition |
|
Repetabilitate: - însuşirea de a fi repetabil |
Repeatability: - the characteristic of being repeatable |
Wiederholbarkeit: - die Eigenschaft,
wiederholbar zu sein |
|
Robot: - sistem automatizat
care acţionează pe baza unui program de lucru stabilit sau care
reacţionează la anumite influenţe exterioare, dând impresia
executării unor acţiuni omeneşti; dispozitiv de mişcare
cu mai multe axe, aplicabile universal; mişcările si traiectoriile
mişcării sunt liber programabile şi, dacă este necesar,
sunt ghidate de senzori; utilizează mâini mecanice sau alte funcţii
de producţie |
Robot: - automated
system that acts on a set program of
work or react to certain external influences,
giving the impression of executing some human actions; movement device with multiple universally applicable
axes; the movements
and the trajectories of movements are freely programmable and, if necessary, are
guided by sensors; it uses
mechanical hands or other production
functions |
Roboter: - automatisiertes System, das aufgrund eines
festgelegten Arbeitsprogrammes betreibt
oder das auf bestimmte äußere Einflüsse reagiert,
und das den Eindruck erweckt, als ob es einige menschliche
Handlungen macht; Bewegung Gerät
mit mehreren universell einsetzbar Achsen; die Bewegungen und die Bahnen von Bewegungen sind frei programmierbar, und, falls
notwendig, werden sie von den Sensoren geführt; es
nutzt mechanische Hände oder andere Produktionsfunktionen |
|
Robotica: - domeniu
pluridisciplinar al ştiinţei şi tehnicii care studiază
proiectarea şi tehnica construirii sistemelor mecanice, informatice sau
mixte şi a roboţilor, în scopul înlocuirii parţiale sau totale
a omului în acţiunea sa asupra mediului înconjurător |
The robotics: - a multidisciplinary field of science and technology which
studies the design and engineering
of building mechanical, computer or mixed systems, as well as
of robots, with the aim of partial or total replacement of man in
his action on the environment |
Die Robotik: - ein
interdisziplinäres Gebiet der Wissenschaft und Technologie, das das
Projektieren und die Konstruktion von den mechanischen, informatishen oder
gemischten Systemen sowie den Robotern, um den Menschen teilweise oder völlig
in seinem Handeln auf die Umwelt zu ersetzen |
|
Sarcina robotului: - îndatorirea
robotului |
The task of the robot: - the duty of the robot |
Die Aufgabe des
Roboters: - die Pflicht des Roboters |
|
Senzor: - convertor care
transformă o mărime fizică
într-o altă mărime mai uşor de evaluat - în mod uzual o
mărime electrică. Dispozitiv care poate monitoriza un proces prin
semnalizarea erorilor, analizarea acestora şi transmiterea
informaţiilor către alte componente. Dispozitive care pot să
opereze atât prin contact fizic sau fără contact fizic |
Sensor: - converter
that changes a physical size into another size that can be more easily measured -
usually an electric
size. A device that can monitor a process by signaling
errors, analyzing them and transmitting the information to other
components. Devices that can operate both through
physical contact or without physical contact |
Sensor: - Konverter,
der eine physikalische Größe in
eine andere Größe umwandelt, die mehr leicht gemessen werden können - in der Regel eine elektrische Größe. Das Gerät, das ein Prozess, durch die Signalisierung der
Fehler, deren Untersuchung und der Übermittlung der
Informationen an andere Komponenten überwachen können. Geräte, die sowohl durch körperlichen Kontakt
oder ohne körperlichen Kontakt arbeiten kann |
|
Sequential function chart: - limbaj grafic
realizat pas cu pas |
Sequential function chart: - graphic language developed step by step |
Ablaufsprache: - grafische Sprache, die Schritt für Schritt
entwickelt werden |
|
Singularitate: -
configuraţie a articulaţiilor robotului în care se pierde un grad
de libertate |
Singularity: - a configuration of the joints of the
robot in which a
degree of freedom is lost |
Singularität: - eine
Konfiguration der Gelenke des Roboters, die ein gewisses Maß an Freiheit
verlieren wird |
|
Sistem de acţionare: - mulţime
de elemente fizice legate între ele care se introduce între generatorul de
energie mecanică si dispozitivul care operează direct asupra
obiectului de lucru şi scopul de a transforma şi transmite energia
mecanică iniţială la organul final care acţionează
asupra obiectului de lucru |
Driving system: -
a lot of linked together physical
elements which are introduced between the
mechanical power generator and the device that
operates directly on the object
of work with a view to transform and transmit the initial mechanical energy to the final body acting on the
object of work |
Antriebssystem: - eine Menge von miteinander verbundenen
physischen Elementen, die zwischen den mechanischen Stromerzeuger
und das Gerät, das direkt über das
Objekt der Arbeit wirkt, eingeführt wird, um die intiale mechanische
Energie zu transformieren und um die intiale mechanische Energie dem Endteil, der über
das Objekt der Arbeit wirkt, überzutragen |
|
Sistem de operare: - reprezintă
un produs de tip software care este parte componentă a unui sistem,
echipament sau aparat computerizat, şi care se ocupă de gestionarea
şi coordonarea activităţilor acestuia |
Operating System: - it is a product of
software type which is a component part of a system, of a computerized equipment or device, and which is in charge of managing and coordinating its activities |
Betriebssystem: - es ist ein Software-Typ Erzeugnis, das
ein Bestandteil eines Systems, eines
EDV-Anlagen oder eines EDV-Gerätes ist, und das
sich mit der Verwaltung und der
Koordination ihrer Aktivitäten befasst |
|
Sistem mecatronic industrial:
- mijloc de producţie care are incorporate echipamente mecanice,
electronice si informatice în scopul realizării uneia sau mai multor
operaţii tehnologice într-un proces de fabricaţie |
Industrial mechatronic system: - a means of production which
incorporates mechanical,
electronic and computer equipment in order
to achieve one or more technical
operations in a manufacturing process |
Industrielles mechatronisches System: - ein Produktionsmittel, das
über mechanischen, elektronischen und EDV-Ausstattungen
verfügt, um eine oder mehrere technologische Operationen in einem Herstellungsprozess zu erreichen |
|
Sistem multisenzor: - sistem
alcătuit din senzori de acelaşi tip sau de tipuri diferite |
Multi-sensor system: - the system consisting of sensors of the same type or different
types |
Multi-sensor-System: - das System bestehend aus Sensoren des gleichen Typs oder verschiedener Typen |
|
Sistem robotic: - sistem tehnic alcătuit din componente mecanice si electrice(hardware) şi componente de programare(software) |
Robotic system: - technical system consisting
of mechanical and electrical components
(hardware) as well as of programming components
(software) |
Robotersystem: -
technisches System, bestehend aus mechanischen
und elektrischen komponenten (hardware) sowie programmierung komponenten (software) |
|
Sisteme de comunicaţii Fieldbus: - componente de automatizare care nu asigură pe acelaşi
sau pe nivele diferite ierarhia de control |
Fieldbus communication systems: - automation components that do not provide the control hierarchy on the same or on different levels |
Fieldbus Kommunikationssysteme: - Automatisierung
Komponenten, die die Hierarchie der Kontrolle auf der gleichen oder auf verschiedenen
Ebenen nicht sichern |
|
Sisteme de coordonate Utilizator/ User coordinate
systems: - definit de utilizator în mod uzual in
legătură cu obiecte staţionare din spaţiul de lucru |
User coordinate systems: - defined by the user usually in connection with stationary objects in the
workspace |
Benutzer-Koordinatensysteme: - wird vom Benutzer in der
Regel in Verbindung mit stationären Objekten im Arbeitsbereich definiert |
|
Sistemul de coordonate al Uneltei/TCP coordinate
systems: - originea este în punctul central al
uneltei, perpendicular pe unealta este axa Z, iar axa X este în direcţia
în care acţionează unealta |
The tool coordinate
system / TCP coordinate systems: - the origin is in the central point of the
tool, the Z axis is perpendicular to the tool, and the X axis is in the
direction in which the tool works |
Das Werkzeug-Koordinatensystem / TCP Koordinatensysteme: - der Ursprung ist
in den zentralen Punkt des Werkzeugs, die Z-Achse steht senkrecht
auf dem Werkzeug, und der X-Achse
ist in der Richtung, in der das Werkzeug arbeitet |
|
Sistemul de coordonate Baza- Base coordinate systems: - originea este la baza robotului |
Base coordinate
systems: - the origin is at the base of the robot |
Basis-Koordinatensysteme: - der Ursprung ist an der Basis
des Roboters |
|
Sistemul de coordonate Universal/ World coordonate
system: - sistem de coordonate cartezian, de obicei,
într-un colţ de la baza spaţiului cartezian al robotului |
The Universal
Coordinate System / The World coordinate system: - the Cartesian
coordinate system, usually in a corner at the base of the robot Cartesian
space |
Der Universal Coordinate System / Die Welt-Koordinatensystem: - das kartesische
Koordinatensystem, in der Regel in einer Ecke an der Basis des kartesischen Raums des Roboters |
|
SLIM: - limbaj de programare pentru roboti. Este o extensie a limbajului BASIC |
SLIM: - Standard Language for
Industrial Manipulators |
SLIM: - Standard Sprache für industrielle Manipulatoren |
|
Software: - sistem de programare pentru computere şi procedurile de aplicare a lor furnizate o dată cu computerul sau alcătuite de utilizator |
Software: - a
programming system for computers and their instructions of use supplied at
the same time as the computer or created by the user |
Software: - ein Programmiersystem
für Computer und ihre Gebrauchsanweisungen zur gleichen Zeit
wie der Computer geliefert oder
vom Benutzer erstellt |
|
Spaţiul de lucru: -
spaţiul în care se desfăşoară o activitate |
The workspace: - the space where an activity takes place |
The Workspace / Der Arbeitsraum: - der Raum, in dem eine Aktivität stattfindet |
|
Structured Text: - text
structurat |
Structured Text: - a text that
is structured |
Structured Text: - einen Text, der strukturiert ist |
|
Teach-in direct: - este o metodă de programare utilă pentru roboţii folosiţi în aplicaţii de tratare a suprafeţelor (vopsire, polizare, şlefuire) |
Direct teach-in: - it is
useful for the robots used in applications of surface treatment (painting,
grinding, polishing) |
Direct Teach-in: - das ist nützlich für die
Roboter, die in Anwendungen von Behandlung der Oberflächen
verwendet werden (Malerei, Schleifen,
Polieren) |
|
Teach-in indirect: - este cea
mai utilizată metodă de programare a robotului |
Indirect teach-in: - it is the most common method of robot programming |
Indirect Teach-in: - das ist die häufigst benutzte Methode der Roboter-Programmierung |
|
Tele-manipulatoare: - manipulatoare
conduse prin unde radio, de exemplu pentru mânuirea unor materiale
periculoase (radioactive sau explozive) |
Tele
- handlers: - handlers led
by radio waves, for example for handling of some dangerous (radioactive or
explosive) materials |
Fernmanipulator: - Manipulatoren, die durch Radiowellen geleitet werden, zum Beispiel für die
Handhabung einiger gefährlichen (radioaktiven
oder explosiven) Materialien / Stoffen |
|
Timer: - temporizator |
Timer: - temporizer |
Timer / Zeitgeber: Verzögerungstaktiker |
|
Toleranţa la defecte: - concept
necesar pentru asigurarea producţiei continue care se impune cu
necesitate în aplicaţiile cu grad înalt de pericol |
The fault-tolerant: - the concept necessary
to ensure continuous production
which is absolutely necessary in applications with a high degree of
risk |
Die Fehlertolerante: -Konzept notwendig, um
eine kontinuierliche Produktion sicherzustellen, die absolut notwendig in Anwendungen mit einem hohen Risiko verbunden ist |
|
Traductoare capacitive: - fac
parte din grupa senzorilor parametrici şi se bazează pe proprietatea că mărimea de măsurat produce o
variaţie a capacitaţii traductorului |
Inductive
transducers: - they are part of the group of parametric sensors and are based on
the property that the size of measuring produces a variation of the
transducer inductance |
Induktive Wandler: - sie
gehören zur Gruppe der parametrischen Wandler und beruhen auf der Eigenschaft,
dass die Größe der Messung eine Variation
der Induktivität des Wandlers produziert |
|
Traductoare inductive: - fac
parte din grupa senzorilor parametrici şi se bazează pe proprietatea că mărimea de măsurat produce o
variaţie a inductanţei traductorului |
Optical transducers: - they use optical
and electronic devices for detecting objects, using red or infrared light |
Optische Wandler: - sie verwenden
optische und elektronische Geräte zur Detektion von Objekten, die Rot- oder Infrarotlicht
verwenden |
|
Traductoare rezistive: - fac
parte din grupa traductoarelor parametrice si se bazează pe faptul ca
mărimea de măsurat produce o variaţie a rezistentei electrice
a traductorului |
Resistive
transducers: - they belong to the group of parametric transducers and are based on
the fact that the size of measuring produces a variation of the electrical
resistance of the transducer |
Widerstandswandler: - sie gehören zur Gruppe der parametrischen
Wandler und beruhen auf der Tatsache, dass die Größe der Messung eine elektrische Widerstandsänderung
des Wandlers produziert |
|
Traiectorie: - drumul parcurs
în spaţiu de un corp în mişcare |
Trajectory: - the
distance covered in space by a body in motion |
Trajektorie: - die zurückgelegte Strecke im Raum eines Körpers in Bewegung |
Capitolul II.
MINIGHID DE CONSTRUCŢIE A ROBOŢELULUI MOBIL
2.1. DEFINIŢII
ALE ROBOŢILOR
La fel ca termenul ,,automatizare”, termenul de ,, robot” este utilizat cu mai multe înţelesuri, în contexte diferite. Câteva definiţii sunt date mai jos:
Roboţii sunt dispozitive de mişcare cu mai multe axe, aplicabile universal. Mişcările şi traiectoriile mişcării sunt programabile şi, dacă este necesar, sunt ghidate de senzori. Roboţii utilizează mâini mecanice, unelte sau alte dispozitive (numite în general end-effectors) pentru a executa manipulări mecanice sau alte funcţii de producţie.
În Germania este necesar ca un robot să aibă mai mult de 3 axe, dar această definiţie nu este acceptată unanim, în întreaga lume. Japonia şi Statele Unite utilizează alte definiţii pentru roboţi. În Japonia un manipulator cu 2 axe comandat manual este considerat robot.
În domeniul roboticii, cei mai interesanţi roboţi sunt numiţi „roboţi inteligenţi”. Ei ar trebui să fie capabili să manipuleze obiecte în lumea reală şi să reacţioneze la evenimente externe. Ei trebuie să fie flexibili, de exemplu să îşi modifice comportamentul. Cel mai important criteriu este multitudinea de senzori folosiţi de robot.
2.2. CLASIFICAREA ROBOŢILOR
Maşinile şi uneltele sunt clasificate după funcţiile pe care le îndeplinesc. Dacă îndeplinesc mai multe funcţii, atunci se grupează după o funcţie principală. Datorită uriaşei varietăţi de funcţii ale roboţilor, aceştia se pot clasifica în diverse grupe de funcţii principale.
Astfel, roboţii de sudură şi de vopsire pot aparţine grupelor de maşini de sudură, respectiv maşini de vopsit.
Roboţii normali(care lucrează cu mâini mecanice) aparţin dispozitivelor de manipulare.
Dispozitive
de manipulare
Dispozitivele de manipulare sunt mecanisme care creează, schimbă şi menţin un aranjament al unor corpuri cu geometrie bine delimitată, într-un spaţiu fizic la care se ataşează un sistem de coordonate.
Mişcarea unor piese sau a unor unelte este o caracteristică funcţională a tuturor roboţilor. Roboţii sunt clasificaţi ca „dispozitive de manipulare” şi aparţin subcategoriei „dispozitive de mişcare”.
În afară de roboţi, există mai multe subclase de „dispozitive de mişcare”:
- Manipulatoare simple
Dispozitive de mişcare controlate manual pentru diverse operaţii de manevrare.
- Tele-manipulatoare
Manipulatoare conduse prin unde radio, de exemplu pentru mânuirea unor materiale periculoase (radioactive sau explozive).
- Dispozitive de alimentare
Mecanisme cu program de mişcare fix. Traiectoriile şi unghiurile de mişcare pot fi modificate mecanic. Sunt prevăzute cu mâini mecanice (gripper) pentru acţiuni de mânuire obiecte.
2.3. CARACTERISTICI ALE ROBOŢILOR
Principalele caracteristici ale roboţilor industriali se pot grupa în mai multe categorii:
a) geometrie:
· spaţiu de lucru
· configuraţia articulaţiilor
· numărul de grade de libertate.
b) încărcătură:
· capacitatea de încărcare
· încărcătură utilă.
c) cinematică:
· viteza şi acceleraţia
· viteza pe traiectorie: viteza uneltei într-o mişcare liniară
· timpul de mişcare.
d) precizie:
· repetabilitate
· precizia de poziţionare.
e) controller:
· hardware
· software
· interfaţă
· programare.
2.4. TIPURI DE ROBOŢI
In aplicaţiile industriale următoarele tipuri de roboţi sunt cele mai utilizate:
2.4.1 Roboţi cu braţ articulat (cu 5 sau 6 articulaţii)
2.4.2 Roboţi SCARA
2.4.3. Roboţi tip portal
2.4.4. Roboţi mobili
2.4.1. Roboţi
cu braţ articulat
Roboţi cu braţ
articulat cu 5 articulaţii
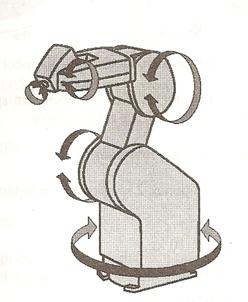
Robot cu
braţ, cu cinci articulaţii
Caracteristici
tehnice:
Aranjamentul articulaţiilor: 5 articulaţii de rotaţie.
Avantaje :
- Spaţiul de lucru mare
- Mişcări rapide
- Se pot instala pe podea sau suspendaţi (de tavan)
- Orientare arbitrară a gripper-ului sau uneltei.
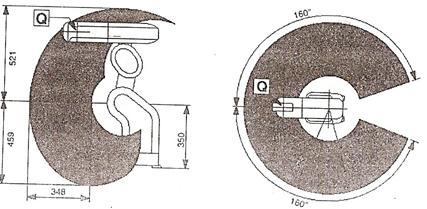
Dezavantaje: restricţii în orientarea end-effectorului (TCP) din cauza lipsei unui al şaselea grad de libertate.
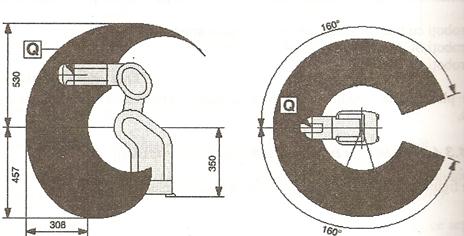
Spaţiul de lucru (culoare închisă) al unui
robot cu cinci articulaţii
Proprietăţi ale roboţilor cu 5
articulaţii:
Aranjamentul articulaţiilor: 1 rotaţional, 2 rotaţional, 3 rotaţional, 4 rotaţional, 5 rotaţional
Viteză: până la 6 m/s
Sarcină: de la
Repetabilitate: aproximativ +/-
Greutate: de la
Aplicaţii ale roboţilor cu 5 articulaţii:
- Alimentarea cu piese pentru maşini-unelte CNC
- Asamblare
- Automatizări de laborator
- Testare
- Educaţie.
Roboţi cu braţ
articulat cu 6 articulaţii
Acest tip de robot mai este numit „robot universal” datorită utilizării pe scară largă în aplicaţii de mânuire (manipulare) şi procesare.
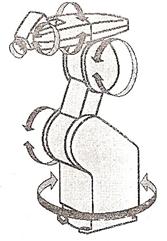
Robot cu braţ articulat, cu şase articulaţii
Caracteristici tehnice:
Aranjamentul articulaţiilor: 6 articulaţii de rotaţie.
Avantaje:
- Spaţiul de lucru mare
- Mişcări rapide
- Se pot instala pe podea sau suspendaţi (de tavan)
- Orientare arbitrară a gripper-ului sau uneltei.
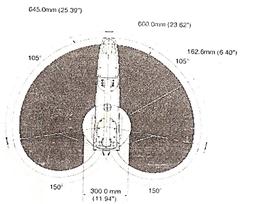
Proprietăţi ale roboţilor
cu 6 articulaţii:
Aranjamentul articulaţiilor: 1 rotaţional, 2 rotaţional, 3 rotaţional, 4 rotaţional, 5 rotaţional, 6 rotaţional
Viteză: până la 8 m/s
Sarcină: de la
Repetabilitate: aproximativ +/-
Greutate: de la
Aplicaţii ale
roboţilor cu 6 articulaţii:
o Sudare
o Vopsire
o Mânuire (manipulare)
o Asamblare.
Spaţiul de lucru (culoare
închisă) al unui robot cu 6 articulaţii
2.4.2. Roboţi SCARA
Roboţii SCARA sunt o particularizare a unui robot articulat, în sensul că ei acţionează prin articulaţii, dar numai într-un plan orizontal. Numele SCARA vine de la acronimul pentru: Selective Compliance Assembly Robot Arm.

Robot SCARA cu patru articulaţii
Caracteristici tehnice:
Aranjamentul articulaţiilor: 2 sau 3 articulaţii rotaţionale, 1 articulaţie liniară.
Avantaje:
- Mişcări orizontale foarte rapide
- Rigiditate mare în articulaţia verticală
- Repetabilitate foarte bună.
Dezavantaje: lucru într-un singur plan.
Proprietăţi ale
roboţilor SCARA:
Aranjamentul articulaţiilor: (1 rotaţional, 2 rotaţional, 3 linear, 4 rotaţional) sau (1 rotaţional, 2 linear, 3 rotaţional)
Viteză: până la 6 m/s
Sarcină: de la 1kg
până la aproximativ
Repetabilitate: aproximativ +/-
Greutate: de la
Aplicaţii ale
roboţilor SCARA:
o Asamblare
o Aplicaţii de manipulare de tip Pick-and-place
o Găurire
o Frezare
o Testare.
Spaţiul de lucru al unui
robot SCARA cu patru articulaţii
2.4.3. Roboţi portal
Un robot portal este instalat deasupra spaţiului de lucru.
Caracteristici tehnice:
Aranjamentul articulaţiilor: 3 articulaţii liniare.
Avantaje:
- Spaţiul de lucru mare
- Posibilitate de manipulare sarcini mari.
Proprietăţi ale
roboţilor portal:
Aranjamentul articulaţiilor: 1 liniar, 2 liniar, 3 liniar (de-a lungul coordonatelor x, y şi z)
Viteză: până la 8 m/s
Sarcină: de la
Repetabilitate: aproximativ +/-
Greutate: până la ordinul tonelor.
Aplicaţii ale
roboţilor portal:
o Transport
o Paletizare
o Asamblare
o Inserare
o Depozite automate.
2.4.4. Roboţi
mobili
2.4.4.1. Definire
Roboţii mobili reprezintă
cea mai spectaculoasă şi reprezentativă categorie de sisteme mecatronice, mai ales datorită încercării
de a copia şi de a se apropia de modele din lumea vie.
În multe şcoli în care se studiază
mecatronica, testul de
maturitate al unui elev este dat de proiectarea şi construcţia
unui robot mobil, de un
anumit tip, cu o structură mecanică mai mult sau mai puţin
complexă, cu motoare de
acţionare care asigură deplasarea în mediul înconjurător, cu
senzori care îi permit
orientarea, identificarea şi evitarea obstacolelor şi cu un
„creier”, constituit
dintr-unul sau mai multe procesoare numerice, care asigură comanda
intregului sistem.
In cazul unui robot mobil avem de a face cu un sistem autonom ce-şi
poate modifica poziţia în raport cu spaţiul de lucru. Cum nu există o metodă directă de măsură a poziţiei
instantanee a robotului mobil, pentru a rezolva problema estimării
poziţiei trebuie integrată mişcarea robotului pe o perioadă
de timp. La aceasta se mai
adaugă erorile în estimarea poziţiei datorate alunecării pe
suprafaţa de deplasare.
Roboţii mobili mai sunt numiţi şi robocare sau vehicule
ghidate şi au sarcini de căutare şi urmărire a unei
traiectorii.
2.4.4.2. Problemele unui robot mobil
1) stabilitatea vehiculului
2 ) propulsia
robotului
3) comanda şi controlul robotului –
dacă robotul se deplasează singur avem probleme cu soft-urile
(alegerea traseului şi ocolirea obstacolelor). Dacă robotul este telecomandat ori radioghidat sunt probleme
legate de transmiterea şi primirea informaţiilor de la robot.
2.4.4.3. Caracteristici de funcţionare specifice:
· Agilitate: capacitatea de evitare sau depăşire a obstacolelor
· Manevrabilitate: caracteristica direct dependentă de minimalizarea spaţiului de manevră (rotiri, întoarceri)
· Grad de mobilitate: permite urmarirea unei traiectorii variate ca formă, lungime sau puncte de oprire
· Viteza de deplasare: capacitatea de a acoperi în cel mai scurt timp distanţa până la un punct ţintă (uzual 1-10 m/s functie de mediu)
· Autonomie: caracterizează dependenţa de o sursa de lumină.
2.4.4.4. Caracteristici comune ale
roboţilor mobili:
- Structura mecanică este un lanţ cinematic serie sau paralel respectiv tip “master-slave”
- Sistemul de acţionare utilizat este electric pentru sarcini mici şi medii şi hidraulic pentru sarcini mari
- Sistemul senzorial utilizează senzori interni(de turaţie, poziţie, efort) la nivelul articulaţiilor, senzori externi(camere TV) pentru scanarea mediului şi senzori de securitate( de proximitate, de prezenţă cu ultrasunete)
- Sistemul de comandă este ierarhizat, de obicei multiprocesor
- Limbajele de programare utilizate sunt preluate de la roboţii staţionari.
2.4.4.5. Categorii de roboţi mobili
Roboţii mobili se clasifică astfel:
- În funcţie de dimensiuni:
- macro
- micro
- nano-roboţi
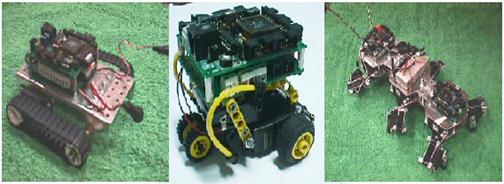
Diferite tipuri de
miniroboţi
- În funcţie de mediul în care acţionează:
- roboţi tereştri – se deplasează pe sol
- roboţi subacvatici – în apă
- roboţi zburători – în aer
- roboţi extratereştri – pe solul altor planete sau în spaţiul cosmic.
- În funcţie de sistemul care le permite deplasarea în mediul în care acţionează există de exemplu pentru deplasarea pe sol:
- roboţi pe roţi sau şenile
- roboţi păşitori: bipezi, patrupezi, hexapozi, miriapozi
- roboţi târâtori: care imită mişcarea unui şarpe, a unei râme etc.
- roboţi săritori, care imită deplasarea broaştelor, cangurilor etc.
- roboţi de formă sferică (se deplasează prin rostogolire) etc.
2.4.4.6. Roboţi mobili pe roţi
In general, roboţii mobili pe roţi sunt utilizaţi în cazul parcurgerii unor suprafeţe plate in care sistemul de locomoţie pe roţi se adaptează la denivelările terenului.

Robot
mobil pe roţi
Caracteristici definitorii
ale roboţilor mobili pe roţi:
· Roţile sunt eficiente în utilizarea roboţilor mobili pe suprafeţe plane (sau cu denivelări reduse)
· Construcţie mecanică relativ simplă
·
Nu au
probleme legate de echilibru
·
Cerinţe
în proiectare: tracţiunea şi stabilitatea, manevrabilitatea şi
controlul
·
Tipul
şi configuraţia roboţilor au rol determinant asupra dinamicii
robotului.
 Sistemul
de locomoţie cu roţi
Sistemul
de locomoţie cu roţi
Acest sistem de locomoţie cu roţi, prevăzute cu pneu, permite viteze de deplasare mai mari decât cel cu şenile.
Roboţii cu astfel de sistem de
locomoţie acţionează de regulă în zone cu teren asfaltat sau
pietruit, având posibilităţi
de trecere peste obstacole mai mici
decât în cazul celor cu
şenile.
În funcţie de greutatea robotului şi sarcina
de manipulat, acest sistem de locomoţie pe roţi Sistem de locomoţie cu
2x3=6 roţi poate fi prevăzut cu 3
roţi, 4 roţi sau 6 roţi acţionarea fiecărei roţi
fiind de regulă individuală.
2.4.4.7.
Roboţi mobili pe şenile
Roboţii mobili cu sistem de locomoţie cu şenile sunt realizaţi într-o gamă foarte variată de dimensiuni şi greutăţi, având diferite grade de mobilitate, în funcţie de complexitatea operaţiilor pe care trebuie să le efectueze, cu diferite viteze de deplasare.

Robot cu şenile
Sistemul de locomoţie cu
şenile
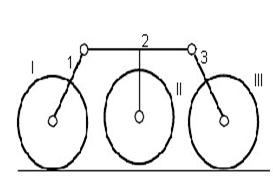
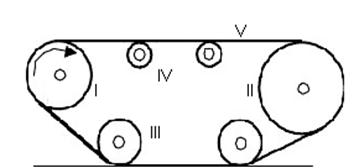
In general, sistemul de deplasare cu şenile are în componenţă:
- o roată motoare I
- o roată de întindere II
- două sau mai
multe roţi purtătoare III
- una sau două roţi de susţinere IV a şenilei V
- şenila V realizată ca un lanţ articulat plan.
Sistem de locomoţie cu
şenilă
 2.4.4.8. Roboţi mobili cu picioare (Umanoid)
2.4.4.8. Roboţi mobili cu picioare (Umanoid)
Din vasta tematică a roboţilor
mobili sunt expuse câteva aspecte din domeniul roboţilor
umanoizi şi al roboţilor LEGO, menite să scoată în
evidenţă principalele probleme pe care le
ridică construcţia şi funcţionarea acestor sisteme şi
pe care specialistul în mecatronică trebuie să le
stăpânească şi să le rezolve.
Consideraţiile privind roboţii
umanoizi sunt preluate dintr-un studiu foarte interesant, de previzionare a
dezvoltarii în viitor a acestor roboţi, finanţat de Comisia Europeană [REG03].Principalele componente tehnice studiate se
impart in şase grupe:
Robot umanoid
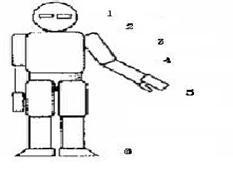
1 -
inteligenţa
2 - percepţia
3 - comunicarea
4 - alimentarea cu energie
5 - manipularea
6 - mersul biped.

2.4.4.9.
Roboţi LEGO
Studiul
mecatronicii reprezintă o problemă foarte complexă, întrucât, pe
lângă cunoştinţe
temeinice din domeniul mecanicii, electronicii şi tehnicii de calcul,
elevul trebuie să înveţe şi cum să integreze
aceste părţi în sistemele mecatronice, pentru a
genera efectele sinergetice. Întrebarea este: care sunt sistemele cele mai adecvate acestui scop?
Experienţa multor universităţi
prestigioase din lume a confirmat faptul că roboţii mobili şi, în
special, roboţii LEGO Robot LEGO
programabili
sunt sisteme
mecatronice ideale, care pot fi utilizate pentru a emula competenţele
inginereşti, interesul ştiinţific, ideile
generale şi creativitatea elevilor.
Sistemul LEGO DACTA asigură un mijloc facil şi eficient de a
configura şi reconfigura structuri de roboţi mobili. El conţine:
- elemente mecanice, incluzând piese
LEGO utilizate pentru a construi structuri mecanice, dar şi diferite
tipuri de cuple (articulaţii), pinioane, curele etc. [MAR95]
- elemente electrice
şi electronice: motoare, diferite tipuri de senzori, sisteme de comandă cu
microcontrollere, interfeţe om-maşină, interfeţe între
PC şi microcontroller
- software pentru dezvoltarea
programelor de comandă a structurilor LEGO.
Roboţii LEGO sunt utilizaţi pe
scară foarte largă în procesul de instruire a tinerilor de la vârstele
cel mai fragede. Aceştia trebuie să abordeze probleme complexe, cum ar fi, de exemplu, urmărirea unei traiectorii
desenate pe podea, cu ajutorul unuia sau a doi senzori. Cele
mai complexe probleme pot fi rezolvate cu ROBOLAB, care implică
utilizarea senzorilor vizuali şi procesarea imaginilor [DUM05].
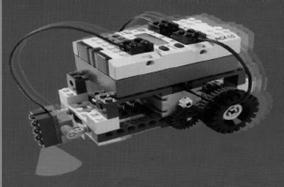
Robot
mobil utilizat pentru teste
2.4.5. Structuri speciale de roboţi
În afară de roboţii standard, a căror structură mecanică a fost descrisă mai sus, există şi alte variante de construcţie a lanţului cinematic. Aceşti roboţi speciali au diferite utilizări şi se construiesc în serie mică sau unicat pentru a fi folosiţi în aplicaţii particulare, cum ar fi:
· Misiuni spaţiale
· Misiuni subacvatice
· Medicină
· Cercetare.
2.4.6. End-effectori
Mecanismul, organul de maşină sau unealta cu care un robot operează, este, în general, în limba engleză, numit end-effector sau simplu effector. În categoria effectorilor intră şi camerele de luat vederi, precum şi echipamente de măsurare. Acestea din urmă permit robotului să interacţioneze cu mediul înconjurător.
Cuplarea dintre braţul robotului cu end-effectorul se face cu ajutorul a patru componente care formează un lanţ de transmisie:
|
Senzor ¯ program ® controller ¯ IR « flange « drive « cinematică « sistem de agăţare « grup de lucru |
Sistemul de control şi de
acţionare al unui end-effector
F Flanşa robotului;
F Motor de acţionare;
F Mecanisme de mişcare ale end-effectorului;
F Sistemul mecanic de apucare (mână mecanică propriu-zisă).
End-effectorul primeşte comenzi de la controller-ul robotului pentru a acţiona sau nu, conform programului realizat de utilizator.
2.4.7. Gripper-e
Un gripper (denumire din limba engleză) fixează mecanic poziţia şi orientarea obiectului apucat, relativ la braţul robotului. Astfel, este posibilă mişcarea şi poziţionarea unei piese, de exemplu, într-o celulă de fabricaţie. Dacă se doreşte obţinerea de informaţii suplimentare despre piesa apucată, gripper-ele pot fi dotate cu senzori speciali.
Tipuri de gripper - e:
v Mecanice
- Mână mecanică cu două degete paralele (posibil cu senzor de poziţie: închis-deschis)
- Mână mecanică cu trei degete paralele (poziţia lor formează un triunghi echilateral)
- Mâini mecanice cu două sau trei degete ce execută mişcări de rotaţie
- Mâini mecanice cu pârghii articulate.
v Cu vacuum
v Magnetice (cu magnet permanent sau electro-magnet)
v Speciale (ex. cârlige, spatule, piese gonglabile etc.).
Gripper-e
cu gheare
Ghearele sunt accesorii metalice, sau din alt material, de o anumită formă geometrică, ce ţin cont de forma externă sau internă a piesei. Se pot folosi mai multe tipuri de gheare cu acelaşi gripper. Ghearele se ataşează pe degetele unor gripper-e mecanice. Cele mai utilizate gripper-e cu degete sunt acţionate pneumatic, deoarece:
§ Sunt uşor de construit
§ Este posibilă implementarea unei protecţii uşoare în caz de cădere a tensiunii (gripper-ul poate să rămână strâns)
§ Sunt ieftine în comparaţie cu alte alternative.
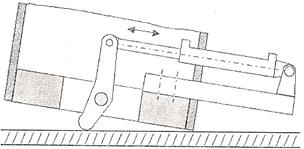
Cleşti mecanici
Diferite sisteme cu pârghie pot converti mişcarea unui cilindru pneumatic sau a unei mâini mecanice cu două degete paralele, într-o mişcare de prindere tip cleşte. Astfel de sisteme sunt folosite pentru reglarea forţei de strângere şi a distanţelor de mişcare a ghearelor.
Gripper-e
cu vacuum
Prinderea cu vacuum este indicată în manipularea pieselor cu suprafaţă netedă, de exemplu sticlă. Pentru piese de formă geometrică mai complexă, pot exista mai multe ventuze, dispuse pe diferite părţi ale piesei, pentru o repartizare uniformă a forţelor de sucţiune.
Tipuri standard de gripper-e cu vacuum:
o Generatoare de vacuum alimentate la presiune (pe baza principiului tubului Venturi), plus ventuză;
o Pompe de vacuum, plus ventuză.
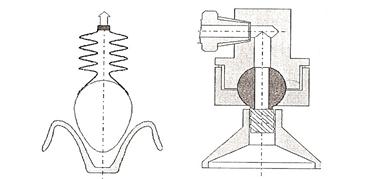
Gripper-e cu
vacuum pentru ouă(stânga) si pentru plăci metalice (dreapta)
Gripper-e magnetice
Gripper-ele magnetice funcţionează cu un magnet permanent sau cu un eletro-magnet (o bobină alimentată cu curent electric este echivalentă cu un magnet temporar). Aceste gripper-e sunt folosite pentru a manipula piese plate din material feromagnetic.
Gripper magnetic cu pârghie
acţionată pentru desprinderea
piesei de pe magnet
Gripper-e
flexibile
Caracteristicile unui gripper flexibil sunt: spaţiul de prindere variabil, forţă de strângere variabilă, adaptabilitate a suprafeţei de prindere ( de contact cu piesa), flexibilitate mecanică a poziţiei şi a orientării gripper-ului.
Gripper-ele flexibile au un spectru mai larg de aplicaţii decât cele standard, dar ele nu sunt aplicabile universal (pentru orice proces de apucare). În vederea adaptării unui robot la situaţii foarte diferite, se folosesc sisteme mecanice de schimbare a gripper-ului sau a sculei.
Gripper-e multi-senzor
În viitor, aceste gripper-e cu mai mulţi senzori se pot folosi pentru extinderea funcţionalităţii robotului. Scopul este de a crea un gripper care posedă capacităţi de sesizare comparabile cu ale unei mâini umane. Pentru a realiza o producţie modernă, inginerii proiectanţi au în vedere încă din faza de proiectare a pieselor, tipul de gripper ce trebuie folosit în faza de asamblare. În acest fel, piesele se pot proiecta pentru a fi posibilă asamblarea lor cu gripper-e mai simple.
2.5. ARII DE APLICABILITATE ALE ROBOŢILOR
Aplicaţiile actuale ale roboţilor sunt foarte variate. Pentru anumite aplicaţii există roboţi speciali, pentru altele există roboţi cu o cinematică (structură mecanică) standard. Oricum, fiecare gen de aplicaţie are propriile necesităţi, de aceea nu s-a putut concepe şi construi, încă, un „robot universal”.
Principalele domenii de utilizare a roboţilor sunt:
- Interconexiuni (asamblări nedemontabile: sudare, lipire, cositorire)
- Transport
- Procesarea suprafeţelor
- Debitare (tăiere)
- Tehnici de producţie: asamblare, poziţionări componente electronice, măsurători.
- Interconexiuni
(asamblări nedemontabile între diferite tipuri de materiale)
Asamblarea nedemontabilă a materialelor necesită o precizie bună şi o calitate ridicată. Dacă un robot execută suduri, lipiri şi cositoriri, procesul poate deveni mai rapid şi mai precis.
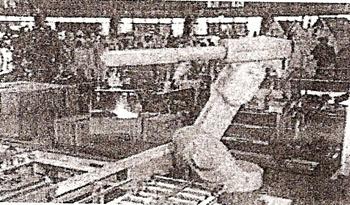
Sudarea în puncte
Sudarea în puncte este una dintre principalele aplicaţii ale roboţilor. În industria automobilelor, dificila muncă de sudare a caroseriilor a fost preluată de roboţi. Utilizarea roboţilor este mult mai economică.
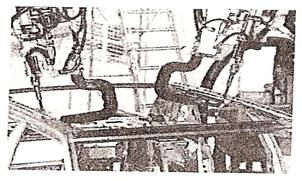
Roboţi ce realizeazã
sudare in puncte a unei caroserii de automobil
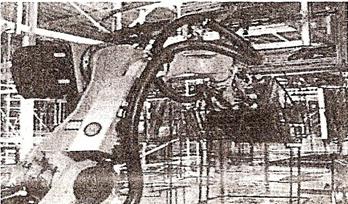
Sudarea cu arc electric
Sudarea cu arc electric este, de asemenea, un domeniu al utilizării roboţilor. Această tehnologie presupune mişcarea robotului pe o anumită traiectorie cu viteză controlată, asemănător cu cea de la maşini CNC. Senzorii tactili, optici şi electrici sunt folosiţi pentru urmărirea formei sudurii. Roboţii echipaţi cu senzori pot corecta deviaţii ale poziţiei pieselor sau ale grosimii materialului.

Cositorire cu robot
Lipirea
În prezent, există multe aplicaţii în care dozarea şi aplicarea cleiurilor de lipire pe diverse suprafeţe se face cu ajutorul roboţilor. La aceşti roboţi, dozarea lichidului de lipire este sincronizată cu viteza de deplasare a diuzei deasupra materialului.
Cositorirea
Cositorirea componentelor electronice pe plăci imprimate este o aplicaţie de succes a roboţilor. Tehnologia implică cositorirea componentelor de acelaşi tip în celule de lucru diferite sau ca acelaşi robot care va schimba aparatul de cositorit după aplicarea mai multor piese de acelaşi tip.
- Transport
Există trei tipuri de aplicaţii de transport:
Mânuirea unor piese
Roboţii se folosesc pentru mânuirea unor piese grele, voluminoase sau care au temperatură mare (în industria metalurgică).
Mânuirea unor obiecte voluminoase (cutii)
Paletizarea
Paletizarea este un proces tehnologic obişnuit la începutul şi la sfârşitul unei staţii de procesare sau ale unei linii de producţie. Roboţii utilizaţi pentru paletizare trebuie să aibă spaţiul de lucru mare şi viteză de mişcare mare. Trebuie să cunoască poziţia în care a fost aşezat paletul, dimensiunile şi modul de aşezare pe palet a obiectelor. Funcţie de mărimea obiectelor, robotul va folosi dispozitive de apucare (gripper-e) speciale.
Paletizare cu robot
Alimentarea cu piese a unor
maşini-unelte
Utilizarea roboţilor pentru alimentarea cu piese a acestor maşini-unelte este justificată, deoarece roboţii pot executa mişcări mai rapide şi mai precise decât un operator uman.
La alimentarea cu piese se folosesc gripper-e duble. Robotul se sincronizează cu maşinile-unelte prin intrări/ieşiri digitale sau prin comunicaţie în reţea.
- Procesarea
suprafeţelor
Domeniul procesării suprafeţelor este destul de dur în ceea ce priveşte condiţiile de lucru şi sănătatea operatorilor umani.
Automatizarea este impusă de condiţiile grele de muncă.
Aplicaţii uzuale ale roboţilor în domeniul procesării suprafeţelor:
· Vopsire
· Polizare şi şlefuire
· Debavurare
Vopsirea
Roboţii de vopsire sunt frecvent utilizaţi în aplicaţiile industriale. Cel mai bun exemplu este cel de vopsire a caroseriilor de automobile, care este deja un standard. Mai mulţi roboţi cooperează la acelaşi stand de lucru pentru vopsirea unei caroserii. Roboţii sunt protejaţi împotriva pătrunderii în articulaţii a vaporilor solvenţi şi a picăturilor de vopsea.
Polizarea şi
şlefuirea
În aplicaţiile de polizare, robotul trebuie să mânuiască o piesă pe care să o preseze cu o forţă controlată asupra unei benzi sau a unui disc de polizare. Mobilitatea braţului robotului permite polizarea piesei sub diferite unghiuri, atât static, cât şi în mişcare. Senzorii speciali trebuie să măsoare forţa de apăsare şi să detecteze poziţia uneltei (discul polizorului), în cazul în care aceasta se uzează.
Debavurarea
În metalurgie, după operaţia de turnare în forme, suprafeţele pieselor sunt acoperite de bavuri. Acestea trebuie îndepărtate cu ajutorul unor discuri sau a unor polizoare. Polizoarele se pot monta pe robot cu ajutorul unor flanşe de metal şi cauciuc. Elasticitatea cauciucului preia şocul transmis în braţul robotului de forma neregulată a bavurilor şi permite mici deviaţii de la traseul exact (programat) al sculei robotului.
- Debitarea
Roboţii utilizaţi în operaţii de debitare trebuie urmărească cu precizie traiectorii complexe. Principalele tehnologii de debitare utilizate cu roboţi sunt:
Debitarea cu jet de apă
Se foloseşte pentru a tăia materiale moi, cum ar fi plasticul sau materialele compozite. Roboţii trebuie să reziste la umiditatea ridicată, rezultată în zona de tăiere.
Debitarea cu laser
Laserul este o tehnologie nouă. Tăierea cu laser este bazată pe separarea termică a materialului. Există mai multe tehnologii de tăiere cu laser ce depind de tipul de gaz folosit pentru suflare:
ü
Tăierea prin sublimare
Raza laser vaporizează metalul. În locul de tăiere, pe lângă laser, trebuie suflat un gaz inert ce va îndepărta materialul vaporizat.
ü
Tăierea prin topire
Laserul topeşte materialul, iar gazul inert îndepărtează topitura. Cu această tehnologie, un robot poate tăia metal în atmosferă controlată (gaz inert), fără să producă oxidare suprafeţelor de separaţie.
ü
Tăierea cu reacţie exotermă
Materialul este încălzit cu o rază laser până aproape de punctul de topire. Un gaz special de ardere (oxigen) este suflat deasupra zonei de tăiat.
Debitarea
convenţională
Roboţii utilizează, pentru tăiere, două tehnologii convenţionale:
Ø
Cu flacără autogen
Aceasta
este cea mai veche metodă folosită pentru procedee de tăiere
termică. Este folosită pentru a tăia oţel slab aliat, cu
grosime de la
Ø
Tăierea cu arc de plasmă
La origine, acest procedeu a fost folosit pentru tăierea metalelor pentru care nu se putea folosi procedeul autogen: aliaje crom-nichel, oţel inox, cupru.
- Tehnici de
producţie
Pentru a utiliza roboţi în acest tip de activitate, este foarte importantă detectarea cu ajutorul senzorilor a orientărilor şi poziţiilor diverselor subansamble sau piese.
În timpul asamblării, robotul trebuie să asigure o vibraţie pentru îmbinarea componentelor. De asemenea, trebuie să controleze forţele de apăsare pentru a nu produce avarii. De-abia ultimele generaţii de roboţi au putut fi folosiţi eficient în produsele de asamblare. De aceea, această arie de aplicabilitate a roboţilor este una dintre cele mai dinamice, acum şi în viitorul apropiat.
Asamblarea de componente
mecanice
Pentru obţinerea unui proces economic de
asamblare există câteva condiţii ce trebuie îndeplinite:
§ Părţile componente trebuie proiectate din start pentru a uşura procesul de asamblare – (de ex. autocentrare).
§ Piesele trebuie să alimenteze standul de asamblare în timp util şi cu o anumită orientare în spaţiu.
§ Procesul de asamblare trebuie să fie menţinut cât se poate de simplu şi trebuie adaptat la spaţiul de lucru al robotului.
Poziţionări de
componente electronice
Roboţii echipaţi cu gripper-e speciale sunt utilizaţi pentru montarea şi lipirea pe placa electronică imprimată a acestor componente mari sau dificil de montat cu maşini de inserţie.
Măsurarea
Măsurarea aleatoare, dintr-un lot de piese, este o metodă utilizată frecvent pentru controlul calităţii produselor. Există aplicaţii în care roboţii preiau de pe banda de producţie, la intervale de timp regulate sau aleatoare, piese pe care le măsoară în vederea verificării calităţii.
Domenii speciale de utilizare
a roboţilor
În afară de producţia industrială, există şi alte domenii în care utilizarea roboţilor s-a impus sau a fost eficientă. Exemple de domenii cu aplicaţii speciale pentru roboţi sunt:
§ Spaţiul extraterestru
§ Laboratoare de cercetare
§ Medicină
§ Producţii în camere sterile
§ Construcţii
Spaţiul extraterestru
În spaţiul extraterestru, prezenţa omului este foarte costisitoare. Instalaţiile pentru susţinerea vieţii şi aprovizionarea astronauţilor sunt complexe şi scumpe, din punct de vedere tehnologic. De aceea, în misiuni spaţiale sunt preferate sistemele automatizate.
Laboratoare de cercetare
Laboratoarele de cercetare în domeniul medicinei, farmaceutic, al chimiei şi bio-tehnologiilor necesită întotdeauna mânuirea unor substanţe sau aparate. Aceste treburi pot fi preluate de roboţi.
Medicină
Fabricarea unui produs medical necesită maximă igienă şi precizie ridicată. O mare parte din produsele farmaceutice sunt produse în camere sterile. Prezenţa omului în aceste locuri poate compromite producţia. De aceea, utilizarea roboţilor este justificată. În camerele sterile, roboţii realizează toate activităţile de mânuire şi de împachetare (încapsulare) a produselor.
Producţii în camere
sterile
Într-o cameră sterilă temperatura şi umiditatea sunt menţinute constante, iar aerul trebuie să aibă cât mai puţine particule de impurităţi (praf, vapori de ulei, aerosoli etc.).
În aceste incinte, roboţii sunt folosiţi, în general, pentru activităţi de manipulare. Mişcările trebuie să fie deseori foarte precise, iar gradul de repetabilitate al mişcărilor este foarte important. În plus, aceşti roboţi trebuie să nu contamineze aerul cu impurităţi.
Construcţii
Roboţii sunt foarte rar utilizaţi în construcţii, în special în zonele de producere a semifabricatelor, dar acei câţiva care sunt în activitate lucrează în următoarele domenii:
§ Lucrări de zidărie
§ Ramforsare în construcţia prefabricatelor
§ Producţia de elemente pentru tavan şi pereţi
§ Construcţii de clădiri automatizate.
2.6. CONSTRUCŢIA ROBOŢELULUI MOBIL ARO 1
Un sistem robotic este constituit din următoarele componente:
Ø Hardware( mecanice şi
electrice):
- braţul robotului
- motoare şi componentele acestora
- controller
- consola de programare(Teach panel)
- mâna mecanică sau unelte
- instalaţii pentru asigurarea siguranţei în exploatare
- sistem intern de senzori
- sistem extern de senzori
Ø Software (de programare):
- sistemul de operare al controller-ului
- programele de aplicaţie ale utilizatorului
- mediul de programare pentru dezvoltare şi simulare de programă utilizator
Ø Hardware
Braţul robotului
Braţul robotului este folosit pentru mişcarea unui effector. El este componenta esenţială a unui robot. Este constituit din piese mecanice individuale(links), conectate între ele cu ajutorul unor articulaţii(joints). Braţul poate avea mai multe articulaţii liniare şi/sau de rotaţie.
La orice robot, primele 3 articulaţii se numesc articulaţii principale. Un robot poate avea şi alte articulaţii, până la 5 sau 6.
Numărul de articulaţii este egal cu numărul de grade de libertate ale robotului.
Spaţiul de lucru
Spaţiul de lucru defineşte acele puncte din spaţiu în care robotul poate ajunge cu effectorul prin poziţionare cu o anumită direcţie de orientare a effectorului.
Elementele mecanice şi articulaţiile formează un lanţ cinematic.
Acest lanţ cinematic este fixat la baza robotului. Ca urmare a tipului de lanţ cinematic folosit în construcţia unui robot, spaţiul de lucru al acestuia poate fi cartezian, cilindric dau sferic.
Sistemul de acţionare
Sistemul de acţionare asigură mijloacele şi energia necesare robotului pentru a executa mişcări în spaţiul de lucru.Deoarece articulaţiile sunt mobile, sistemul de acţionare trebuie să aplice asupra acestora forţe şi momente în aşa fel încat robotul să fie rigid, chiar şi atunci cand nu se mişcă. Trebuie prevăzute puterile de acţionare necesare pentru a compensa greutatea proprie a robotului şi a putea manipula obiecte sau scule cu end-effector.
|
Stepping motor d.c. motor |
Controller Electric
Rotational |
||
|
Pneumatic cylinder compressed air engine |
Pneumatic Hydraulic |
Actuation |
Liniar Movement |
|
Hydraulic cylinder |
Energy |
||
Componentele de acţionare(hardware)
Acţionarea roboţilor folosesc motoare electrice, pneumatice şi hidraulice. In general motoarele electrice sunt cele mai utilizate pentru acţionarea roboţilor.
O acţionare mecanică cu motor electric pas-cu-pas sau cu servomator de curent continuu cuprinde:
- frâne
- mecanisme de transmisie(cu lanţ, cu roti dinţate, cu cremalieră)
- circuit electric de forţă(amplificator)
- controller pentru comanda circuitului de forţă
Acţionari pneumatice:

Elemente de acţionare: motoare şi cilindri pneumatici.
Utilizare: manipulatoare cu două, trei articulaţii, gripper-e.
Acţionari
hidraulice:

Elemente de acţionare: cilindri hidraulici şi motoare rotative hidraulice, pompe de ulei şi valve de control.
Utilizare: roboţi pentru acţionări de putere, cu forţe şi momente mari.
Acţionari
electrice:
Elemente de acţionare: servo-motoare(motor şi controller în tandem).
Utilizare:aplicaţii unde sunt necesare forţe mici şi medii(aprox. 80% din roboţeii industiali şi mobili).
Controller-ul
Controller-ul unui robot este interfaţa dintre operator şi componentele mecanice şi electrice ale robotului. Misiunea lui este de a controla cinematica robotului şi de a oferi operatorului suport maxim pentru utilizarea eficientă a robotului. Pentru îndeplinirea acestor misiuni controllerul asigură urmatoarele funcţii:
- comunicaţia cu operatorul
- suport pentru programare
- gestiunea programelor
- interpretarea programelor
- coordonarea articulaţiilor pentru mişcarea programată a effector-ului
- realizarea reglării automate a poziţiilor fiecărei axe conform cu valorile de poziţionare calculate
- comunicaţia cu alte maşini din celula de lucru
- asigurarea şi menţinerea unor condiţii de siguranţă
Panoul de operare( Teach Panel)
Panoul de operare( Teach Panel) poate avea un mic afişaj LCD cu câteva linii de text sau un ecran mare ce funcţionează în mod grafic, în culori. In afară de afişaj, panoul de operare include
- buton de Oprire de Urgenţă
- comutator de activare/dezactivare robot
- taste funcţionale pentru generarea, modificarea, selecţia şi testarea programelor
- taste funcţionale, manete sau potenţiometre pentru comenzi manuale de mişcare a robotului
- taste funcţionale pentru controlul echipamentelor periferice(mână mecanică, unelte)
Senzori interni
Sistemul intern de măsurare al robotului este constituit din traductoare ataşate braţului mecanic. Sunt măsurate principalele mărimi de interes pentru poziţionarea robotului şi pentru cunoaşterea stării acestuia. Contreller-ul robotului are acces direct la volorile măsurate cu aceşti senzori.
Variabile măsurate:
- poziţii şi unghiuri(poziţiile articulaţiilor)
- viteze şi acceleraţii
- forţe şi momente
- curenţi şi tensiuni în motoare
Ø Software
Scopul activităţii de programare a robotului este acela de a transfera o succesiune de mişcări complexe către controller-ul robotului, folosind instrucţiuni simple şi diverse metode de programare, astfel încât să poată fi automatizat un proces.
Metode
de programare:
Robot programming: Online: - manual
- teach-in: - direct
- master-slave
- indirect
Offline: - graphical
- textual: - explicit
- implicit
- other
PLC-uri – Definiţie, Limbaje standardizate,
Structură, Funcţionare
Termenul de PLC este definit prin IEC-1131: Un sistem electronic(digital) de operare, proiectat pentru utilizarea în mediul industrial, ce foloseşte o memorie programabilă pentru stocarea internă a instrucţiunilor necesare implementării unor funcţii specifice(logice, secvenţiale, temporizare, contorizare, calcul matematic), pentru a controla prin intrările şi ieşirile digitale şi analogice diferite tipuri de maşini sau procese’’.
Aşadar, un PLC este un computer proiectat pentru mai multe funcţii de control.
PLC-urile pot fi:
- cu structură monobloc
- cu structură modulară
PLC-uri : a)
structură monobloc; b) structură modulară
Majoritatea PLC-urilor permit montarea adiţionala a unor module prin care se largeşte setul(numarul) de semnale procesate sau care îmbogăţesc gama funcţiunilor: module de intrare/ieşire digitale şi/sau analogice, module de poziţionare, module de comunicaţie.
Din punct de vedere funcţional, în structura unui PLC se disting trei componente cu roluri bine definite:

Structura unui PLC
- module de intrare - preiau semnalele din sistemul controlat prin intermediul senzorilor şi le convertesc în semnale logice pentru a putea fi prelucrate de CPU.
-
unitatea centrala de prelucrare(CPU) -
procesează semnalele primite pe baza instrucţiunilor unui program, ia
decizii şi emite semnale de
-
module de ieşire – convertesc semnale de
Programarea aplicaţiilor se realizează în general pe un sistem de calcul auxiliar(PC) care comunică cu PLC-ul printr-un port serial.
Producătorii controllerelor industriale asigură mediile
software de dezvoltare şi implementare a aplicaţiilor: STEP 7, FST, CX
Programmer, RS Logix etc.
Aceste medii permit dezvoltarea
aplicaţiilor în diverse limbaje de programare, mai mult sau mai puţin
populare:
Ladder diagram
Statement list
Structured text
Sequential function chart etc.
Unele PLC-uri sunt
prevăzute suplimentar şi cu dispozitive dedicate de programare
şi diagnosticare (console de
programare).
În
funcţionarea PLC-urilor se disting ca elemente specifice pentru aceste
tipuri de structuri: procesarea
ciclică şi imaginea
de proces.
Procesarea ciclică
presupune parcurgerea programului ,,linie cu linie” şi, după
prelucrarea ultimei instrucţiuni, reluarea prelucrării de la început.
Rularea ciclică a programului va continua până la comanda de oprire.
Modul de
funcţionare a unui PLC
Imaginea de proces este o zonă a memoriei
în care este înregistrată configuraţia intrărilor la începutul
ciclului şi în care se actualizează configuraţia ieşirilor
pe parcursul rulării unui ciclu.
Structura
hardware a unui PLC
Structura hardware de principiu a unui PLC este
prezentată în figura de mai jos.
Schema bloc a PLC-ului
În
continuare se detaliază trei elemente importante ale acestora:
-
unitatea
centrală de procesare
-
memoria
-
interfeţele de intrare/ieşire.
PLC-ul este un
echipament electronic de automatizare care poate conduce un proces numai
după efectuarea legăturilor cu senzorii şi cu elementele de
execuţie (actuatori), urmată de înscrierea programului de lucru în
memoria automatului. Legătura dintre PLC şi procesul condus se
asigură prin intermediul interfeţelor de intrare/ieşire (module
de intrare/ieşire). Fiecare senzor trebuie conectat la o
interfaţă de intrare a automatului şi fiecare actuator trebuie
conectat la o interfeţă de ieşire a automatului.
Programul de
lucru al PLC-ului se scrie într-un limbaj de programare adecvat, cu ajutorul
unui dispozitiv de programare (ex. PC).
Programul se
stochează în memoria automatului şi execuţia programului este
controlată de procesorul unităţii centrale. Faptul că
memoria automatului poate fi ştearsă şi apoi încărcată
cu un nou program ori de câte ori se doreşte, sau că programul din
memorie poate fi modificat după dorinţă, oferă PLC-ului
flexibilitate în utilizare. PLC-ul este conceput totodată pentru
funcţionarea în mediu industrial: este insensibil la perturbaţii
electromagnetice, poate funcţiona într-un domeniu larg de temperatură
şi de umiditate, este compatibil direct cu procesul prin utilizarea unor
semnale la tensiuni industriale etc.
PLC-ul este conceput
totodată pentru funcţionarea în mediu industrial: este insensibil la
perturbaţii electromagnetice, poate funcţiona într-un domeniu larg de
temperatură şi de umiditate, este compatibil direct cu procesul prin
utilizarea unor semnale la tensiuni industriale etc.
Unitatea centrală
Reprezintă
"creierul" automatului programabil şi are rolul de a pune în
legătură interfaţa de intrare, memoria de date şi
interfaţa de ieşire, pe baza programului descărcat de utilizator
în memoria program. Unitatea centrală interpretează
instrucţiunile din memoria program, pe baza cărora efectuează
evaluări logice, calcule aritmetice, prelucrări numerice ale
variabilelor de intrare şi furnizează un rezultat memoriei de date
sau interfeţei de ieşire.
Memoria
Memoria PLC-urilor este
alcătuită din circuite electronice integrate care sunt capabile
să înregistreze informaţii sub formă binară (0 logic sau 1
logic).
Informaţia elementară este bit-ul,
denumire care provine de la "binary digit" din limba engleză.
Memoria joacă un rol important în funcţionarea PLC-ului deoarece
reprezintă locul în care se înscrie programul de lucru al aplicaţiei
sub forma unei liste de instrucţiuni.
Procesorul citeşte din
memorie instrucţiunile programului şi le execută. Memoria PLC-ului este organizată în:
memoria de date şi memoria program.
Memoria
program păstrează programul realizat şi încărcat de
utilizator prin intermediul calculatorului sau al consolei de programare.
Memoria program este nevolatilă, de tipul flash sau EEPROM.
Memoria
de date sau memoria de lucru, reprezintă zona volatilă a memoriei
automatului programabil. Aici sunt stocate rezultatele ale operaţiilor
efectuate de unitatea centrală sau valori introduse de operator de la un
terminal extern (consolă de programare, terminal programabil) şi care
sunt apoi prelucrate de către unitatea centrală.
Această
zonă de memorie poate fi asimilată memoriei RAM de la calculatoarele
personale (PC-uri). Majoritatea automatelor programabile sunt prevăzute cu
baterie pentru a păstra conţinutul unor zone din memoria de date
şi după pierderea tensiunii de alimentare.
Din
punctul de vedere a modului de stocare a informaţiei înscrise în memorie
se deosebesc două tipuri principale de memorii: memorii care pot fi
şterse (volatile); memorii care
nu pot fi şterse (nevolatile).
Ambele
tipuri de memorii se utilizează în PLC-uri.
Module
(interfeţe) de intrare/ieşire
Comunicarea unui PLC cu
aplicaţia se realizează prin intermediul canalelor de intrare şi
ieşire (intrări, ieşiri).
Intrările
şi ieşirile unui PLC sunt necesare pentru monitorizarea şi
controlul procesului şi pot să fie de două tipuri: logice sau
continue.
Intrările vin de la senzori care
convertesc mărimile fizice în semnale electrice.
Ieşirile spre elementele de
acţionare permit PLC-urilor să genereze o anumită acţiune
în proces.
Ansamblul
modulelor electronice de intrare amplasate între bornele de intrare ale
automatului şi magistrala internă constituie interfaţa de intrare. Interfaţa de intrare este
prevăzută cu un anumit număr de canale de intrări logice
sau analogice. Fiecărei intrari i se alocă o adresă.
Modulele
electronice amplasate între magistrala internă şi bornele de
ieşire ale automatului constituie interfaţa
de ieşire.
Modulele de ieşire sunt adesea construite
pe bază de relee, dar deasemenea pot să includă, tranzistoare
pentru ieşirile de curent continuu sau triace pentru ieşirile de AC.
Interfaţa de ieşire este
prevăzută cu un anumit număr de canale de ieşiri logice sau
analogice. Fiecărei ieşiri i se aloca câte o adresă.
În
PLC-urile monobloc intrările şi ieşirile sunt integrate în
aceeaşi unitate. Pentru PLC-urile modulare intrările sunt
achiziţionate prin module sau carduri.
În figura de mai jos se arată cum se face
conectarea a două intrări la un modul (card) de intrare. Ambele
contacte(un buton de apăsare şi contactul unui releu termic) sunt
conectate de o sursa de curent alternativ.
Când contactele sunt închise,
se alimentează intrările. Dacă tensiunea de intrare pe o intrare
este mai mare de o anumită valoare, se va activa intrarea respectivă
(trece în 1 logic).
Modul de intrare
(este utilizată notarea
Allen Bradley pentru PLC-uri: I: 013 indică faptul că modul de
intrare e montat în rack-ul 01, slotul 3; 01 şi 03 indică adresele
intrărilor)
Conectarea
unui modul de ieşire (24 Vcc)
DERULAREA PLASAMENTULUI


Koblenz, Germania


Grup Şcolar Industrial”Ştefan Procopiu”, Vaslui
Elevii participanţi la stagiul de pregatire practică au dobândit cunoştinţe, abilităţi şi competenţe aferente Modulului IX “ Circuite electronice”, (conform programei şcolare M.E.C.T.S.).
Programul detaliat al perioadei de formare, care a
vizat construcţia roboţelului mobil ,,ARO 1’’:

Săptămâna I
Ziua 1
Prezentarea tutorelui de
plasament, prezentarea participantului.
Tutorele de stagiu a prezentat
laboratoarele şi atelierele de instruire practică, sculele şi
echipamentele de lucru utilizate pentru realizarea montajului, organizarea
locului de muncă şi normele de sănătatea şi
securitatea muncii specifice locului de muncă şi operaţiilor pe
care le execută pe parcursul derulării activităţii.
Tutorele a prezentat:
- circuite electronice;
- SDV- urile şi AMC- urile necesare pentru măsurarea şi
verificarea parametrilor mărimilor electrice (tensiune, intensitate,
putere);
- atelierul de pregătire practică si echipamentele tehnice necesare pentru
programarea microcontroller-ului unui robot.
Evaluarea initială: pe baza unor scheme electrice de principiu
participantul a identificat şi
utilizat sursele de alimentare şi modul de conectare a amplificatorului în
echipamente electronice.
Tutorele a observat şi evaluat participantul
pe baza unei fişe de lucru completată zilnic.

Ziua 2
Tutorele de stagiu:
- a prezentat sursele de alimentare a aparaturii electronice şi
schemele electrice de principiu ce urmau a fi realizate;
- a distribuit
fişe de lucru şi documentaţia tehnică necesară
realizării montajului.
Participantul:
- a identificat şi interpretat semnele convenţionale folosite în
realizarea schemelor electrice de principiu;
- a identificat sursele de alimentare necesare funcţionarii echipamentelor electronice;
- a conectat sursele de alimentare în cadrul echipamentelor electronice de
tipul: receptoarelor TV. şi monitoarelor;
- a completat fişa de lucru cu rezultatele obţinute în urma
măsurătorilor.
Ziua 3
Tutorele de stagiu:
- a prezentat materialele necesare pentru realizarea unei surse de
alimentare stabilizate şi AMC-urile necesare( voltmetre, ampermetre,
wattmetre) pentru măsurarea parametrilor caracteristici(tensiune,
intensitate, putere);
- a prezentat participanţilor schemele electrice ale redresoarelor,
stabilizatoarelor pentru realizarea montajului;
- a distribuit fişe de lucru în care erau precizate caracteristicile
redresoarelor şi stabilizatoarelor.
Participantul sub îndrumarea tutorelui:
- a intocmit necesarul de materiale
şi componente pentru realizarea unei surse de alimentare conform schemei
alese, redresor stabilizat;
- a ales AMC-urile specifice pentru măsurarea parametrilor caracteristici(tensiune - voltmetre, intensitate - ampermetre, putere-
wattmetre) existente în dotarea atelierului de instruire practică -
Electrotehnică;
- a verificat şi sortat componentele electronice pentru
realizarea montajului;
- a realizat montajul şi a efectuat măsuratorile;
- a completat fişa de lucru.
Ziua 4
Tutorele de stagiu:
- a distribuit
materiale necesare realizării cablajului specific schemei electrice;
- a îndrumat participanţii să-şi identifice AMC-urile( voltmetre, ampermetre, wattmetre)
necesare pentru măsurarea caracteristicilor( tensiune, intensitate, putere);
- a prezintat fişa de lucru.
Participantul sub indrumarea tutorelui:
- a trasat schema de cablaj;
- a realizat cablajul utilizând
componente electronice specifice;
- a completat fişa de lucru.
Ziua 5
Tutorele de stagiu:
- a distribuit mijloace de lucru necesare plantării şi lipirii componentelor;
- a urmărit şi
supravegheat operaţia de plantare
şi lipire;
- a prezintat fişele de lucru pe care participanţii le-au
completat după verificarea circuitelor.
Participantul sub îndrumarea tutorelui:
- a executat plantarea şi
lipirea componentelor pe placa de cablaj;
- a verificat circuitele realizate utilizând AMC-urile specifice;
- a completat fişa de lucru cu rezultatele obţinute.
Saptamana II
Ziua 1
Tutorele de stagiu:
- a explicat participanţilor în
ce constă proba de încercare şi reglaj final a montajului;
- a prezintat defectele caracteristice şi
condiţiile de efectuare a măsuratorilor de curent şi tensiune
utillizând AMC-urile;
- a supravegheat activitatea, a intervenit şi corectat.
Participantul sub indrumarea tutorelui:
-a executat
încercari sub tensiune a montajului, probe şi reglaj final, a
efectuat măsurători de
tensiune şi curent cu multimetre digitale şi analogice;
- a identificat şi remediat defectele semnalate;
- a completat fisa de lucru.
Ziua 2
Tutorele de stagiu:
- a prezentat tipurile de
amplificatoare (de tensiune, de curent, de putere), simbolizarea, rolul
funcţional;
- a prezentat principalele caracteristici ale amplificatoarelor
şi factorii care influentează
funcţionarea şi performanţele acestora;
- a explicat
participanţilor schemele de
principiu ale amplificatoarelor;
- a distribuit si discutat cerinţele fişei de lucru;
Participantul sub indrumarea tutorelui:
- a citit şi interpretat schemele de principiu ale amplificatoarelor de
putere;
- a identificat tipurile de
amplificatoare;
- a conectat amplificatoarele în
circuite electronice;
- a completat fişa de lucru.
Ziua 3
Tutorele de stagiu:
- a prezentat participanţilor AMC-urile pe care le vor
folosi pentru efectuarea de verificări si măsurători în etajele
de amplificare din diverse echipamente electronice.
Participantul sub indrumarea tutorelui:
- a identificat etajele de amplificare din echipamente electronice: etaj
preamplificator, etaj amplificator de putere;
- a efectuat
măsurători în circuite de amplificare utilizând multimetre digitale
si analogige pentru reglaje;
- a completat fişa de lucru.

Ziua 4
Tutorele de stagiu:
- a comunicat participanţilor sarcina de lucru pe care
aceştia o vor realiza în
“conectarea amplificatorului” in circuit;
- a distribuit fişe de lucru şi a
urmarit realizarea sarcinii de lucru;
- a comunicat cu participanţii
pe parcursul derulării sarcinii de lucru.
Participantul sub indrumarea tutorelui:
- participanţii organizaţi pe grupe de lucru au realizat sarcina de lucru “conectarea
amplificatorului”;
- au executat operaţii de
conectare, de identificare a defectele
apărute în circuit şi au remediat
defectele utilizând AMC- urile şi trusele de scule din dotare;
- au completat fişa de lucru cu
rezultatele obţinute şi le-au interpretat.
Ziua 5
Tutorele de stagiu:
- a prezentat participanţilor circuite integrate de
tip digital;
- a prezentat montarea - demontarea circuitelor integrate
digitale;
- a descris rolul şi
funcţiile unui controller privind mişcările robotului.
Participantul sub indrumarea tutorelui:
- a identificat circuitele integrate digitale după aspect fizic şi marcaj: memorii (RAM,
EPROM, EEPROM), microcontrollere;
- a observat rolul şi
funcţia microcontrollerului(de a controla mişcarea) unui robot;
- a completat fişa de lucru
care cuprinde funcţiile unui microcontroller şi structura unui
controller de robot.

Săptămâna III
Ziua 1
Tutorele de stagiu:
- a prezentat părţile
componente ale unui sistem robotic (hardware şi software): mecanice,
electrice şi de programare( de operare a controller-ului, programele de
aplicaţie, simulare de programe);
- a stabilit gradele de libertate
si posibilităţile de mişcare
privind orientarea robotului “ARO
- a prezentat normele de sănătate şi securitate a muncii;
- a distribuit fişe de lucru cu părţile componente ale unui
sistem robotic.
Participantul sub îndrumarea
tutorelui:
- a identificat părţile
componente ale unui robot;
- a ales modul de acţionare a robotului utilizând motoare electrice
de tipul motor şi controller în tandem;
- a completat fişa de lucru.

Zilele 2-3
Tutorele de stagiu:
- a organizat elevii în trei grupe de lucru,
fiecare grupă primind o
sarcină de lucru:
- prima grupă: asamblarea componentelor
mecanice;
- a doua grupă: montarea componentelor
electrice;
- a treia grupă: sistemul de programare
PLC.
- a stabilit sarcinile pentru fiecare
grupă;
- a prezentat
normele de sănătate şi securitate a muncii specifice
laboratorului de robotică.

Participantul sub îndrumarea tutorelui:
- prima grupă a realizat asamblarea componentelor mecanice ale
robotului;
- a doua grupă a executat asamblarea şi lipirea componentelor electronice
pe placa de montaj şi fixarea
senzorilor;
- a treia grupă a utilizat sistemul de programare a robotului-PLC în
scopul transferării robotului unei succesiuni de mişcări prin
intermediul unui controller;
- a completat fişa de lucru.

Ziua 4
Tutorele de stagiu:
- a însotit participanţii în firmă pentru prezentarea roboţilor utilizaţi în industrie de
tip manipulatoare, tele-manipulataore, dispozitive de alimentare;
- a prezentat participanţilor principalele caracteristici(
spaţiul de lucru, numărul gradelor de libertate, configuraţia
articulaţiilor, cinematica, precizia) şi modul de programare;
- a prezentat participanţilor avantajele utilizării acestora în
domenii cum ar fi: asamblări nedemontabile(cositorire, sudare, lipire),
procesarea suprafeţelor, debitare, tehnici de producţie(asamblare,
poziţionări componente electronice, măsurări);
- a prezentat
regulamentul de ordine interioară din cadrul firmei.

Participantul sub îndrumarea tutorelui:
- a vizitat firma
în care se utilizeaza roboţi;
- a observat
mişcările şi traiectoriile roboţilor cu mai multe axe;
- a
învatat să programeze şi sa realizeze sub îndrumarea
tutorelui programarea roboţilor
care se deplasează pe doua
axe şi realizează:poziţionări de componente electronice,
măsurări, transportul şi redirecţionarea unor piese;
- a identificat roboţii utilizaţi în
alte domenii: sudură, lipire, cositorire,
debitare(tăiere),poziţionări de componente electronice.

Ziua 5
Tutorele de stagiu:
- a prezentat proba de evaluare finală – orientarea robotului “ ARO
- a distribuit fişe de evaluare finală privind construcţia robutului “ ARO
- împreună cu profesorul însoţitor a evaluat activitatea
derulată şi a oferit feed-back-ul programului.
Participantul sub indrumarea tutorelui:
- a realizat proba de funcţionare
a robotului;
- fiecare grupă a prezentat
modul de realizare a părtilor componente ale robotului şi
metoda de programare(PLC- componenta centrală de control);
- a identificat
dificultăţile întalnite pe parcursul realizării robotului
“ ARO
- a completat fişa de
evaluare finală.
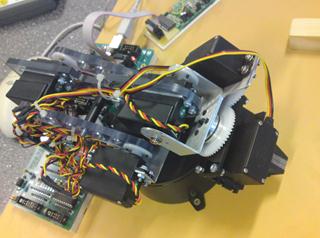
ARO
A system comes into operation…
Sistemul de operare
A joint project of Christiani and the Carl-Benz-Schule
Koblenz
Proiect comun Christiani
si Carl-Benz-Schule Koblenz
Problema:
Educaţia modernă în domeniul IT, ingineria electrică şi pentru servicii în industria de prelucrare a metalelor eşuează deseori datorită lipsei de materiale noi şi accesibile pentru învăţat şi predat în cantităţi mari.
Soluţia
şi aplicaţia :
ARO a fost realizat astfel încât în timpul procesului de funcţionare să ofere suport de învăţare de inaltă performanţă în numeroase domenii.
ARO a fost dezvoltat preferenţial pentru învăţământul tehnic fiind utilizat in diferite şcoli tehnice şi domenii de activitate înalt tehnologizate. În plus ARO permite munca interdisciplinară dintre diferite discipline(mecanică, electronică, informatică).
Elemente
componente :
Ø PC
Ø PLC
Ø Microcontroller
Caracteristici:
1 Construcţie modulară / Interfeţe deschise
2 Nu este necesar un motor costisitor
3 Nu este necesară o limită de intrerupătoare
4 Disponibilitatea de acces pentru senzori
5 Modul salvare-sistem
6 Control independent în traseu
7 Modul automat – închidere - pentru deconectare atunci când nu este folosit sistemul
8 Configuraţia independentă a fiecarui actuator
9 Modul de auto-pornire / modul de autoreglementare
10 Modul de industrializare / bloc de prelucrare
11 Firmware usor de updatat
12 Accesul
modulului de memorie USB
13 Aprovizionare
cu Techware adecvat
14 Placa de
bază adecvată pentru exerciţii în domeniul
tehnologiilor microcontroller-ului.
ARO – exemple şi aplicaţii
ÎN LOC DE CONCLUZII
Proiectele europene ne-au ajutat să descoperim mecatronica?

Da, din dorinţa de cunoaştere şi dezvoltare a acestei specializări, plecând de la faptul că mecatronica
înseamnă schimbarea modului de gândire şi de acţiune,
dezvoltă creativitatea, iniţativa şi asumarea răspunderii,
încă din anul 2004 şcoala noastră s-a implicat în elaborarea şi derularea de proiecte în cadrul Programelor Europene, Leonardo
da Vinci, Comenius care să susţină pregătirea elevilor şi profesorilor
în această specializare.
Astfel, elevii şcolii însoţiti de
profesori au beneficiat şi beneficiază de stagii de pregătire practică
în domeniul mecatronicii în tări europene în care mecatronica ocupă
un loc central.
Incepand
din anul 2004 şi până în prezent am derulat şi continuăm
să derulam - programe Leonardo da
Vinci, Comenius după cum
urmează:
Ø 2004, un grup de elevi de

Koblenz, 2004 Germania
Ø 2006, un grup de
elevi de
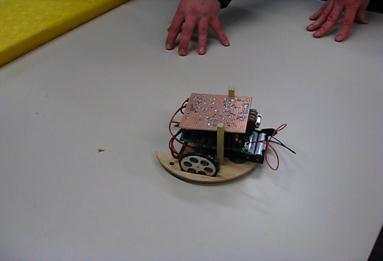
Koblenz, 2006 Germania
Ø 2008, un grup de elevi
şi profesori de
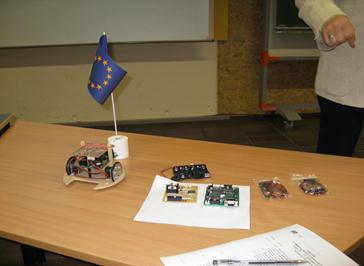
Ø 2010, un grup de elevi
şi un profesor de
Ø 2011, un grup de
elevi şi un profesor de

Koblenz, mai 2011
ANEXE
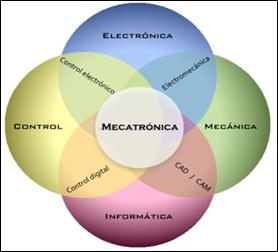
CHESTIONAR
Sunt profesor specializat în mecatronică şi aplicaţii industriale şi am realizat un studiu de piaţă referitor la preferinţele elevilor de clasa a VIII-a privind specializarea pentru care vor dori să opteze după absolvirea testelor naţionale. Pentru aceasta am propus un set de întrebări la care să răspundă viitorii absolvenţi.
1. Care este profilul la care doriţi să vă înscrieţi la liceu?
……………………………………………………………….........................................................
……………………………………………………………….........................................................
2. Ce surse de informare utilizaţi?
………………………………………………………………….....................................................
………………………………………………………………….....................................................
3. Care este specializarea pentru care doriti să optaţi?
………………………………………………………………….....................................................
………………………………………………………………….....................................................
4. Dintre specializările de mai jos sunt mai aproape de opţiunea preferată:
a. operator tehnică de calcul;
b. tehnician mecatronist;
c .designer vestimentar;
d. mecanic întreţinere şi
reparaţie.
5. Ce aşteptări aveţi de la specializarea aleasă?
…………………………………………………………………………….....................................
…………………………………………………………………………….....................................
6. Cine v-a ajutat în alegerea făcută?
……………………………………………………………………………….................................
……………………………………………………………………………….................................
7. Date de identificare:
Nume/Prenume:……………………………………………………………..Vârsta:………………………………………………………………………................................................................
Telefon:………………………………………………………………………...............................
Adresă:……………………………………………………………………....................................
Prezentarea chestionarului
Acesta îşi propune:
-să identifice cât la sută
din totalul de 100 de elevi vor opta pentru profilul tehnic;
- să identifice cât la
sută din totalul de 100 de elevi vor opta pentru specializarea
,,Mecatronică’’;
-să identifice sursele de
informare a elevilor.
Grupurile ţintă de elevi sunt:
-o clasă de 25 elevi, Scoala Nr. 4 Vaslui;
-o clasă de 25 elevi, Scoala Nr.1 Vaslui;
-o clasă de 25 elevi, Scoala Nr.1 Sauca;
-o clasă de 25 elevi, Scoala Nr.1 Moara Greci.
Analizarea chestionarelor
-din totalul elevilor chestionaţi 80 % optează pentru profilul tehnic;
-din totalul elevilor chestionaţi care optează pentru profilul tehnic: 42% optează pentru specializarea tehnician mecatronist; 28% optează pentru specializarea operator tehnică de calcul; 10% din elevi sunt nehotărâţi;
-sursele de informare: prezentarea pe scurt a ofertelor şcolare de
către diriginţi; broşuri; pliante; elevi şi prieteni care
studiază
Concluzii
-elevii nu au fost informaţi;
-elevii nu au cunoştinţe despre posibilităţile de
studiu din şcoala noastră;
-oferta şcolară nu a fost derulată de un profesor de
specialitate.
Elevul trebuie să ştie
că aceasta calificare - ,,tehnician mecatronist’’ oferă posibilitatea
găsirii unui loc de muncă atât în România cât şi în unele
tări europene puternic industrializate, în care mecatronica este de mult
consacrată şi ocupă un loc central în sistemul de învatamânt.
Exista riscul de a face o alegere greşită, dar acest risc poate
fi eliminat deoarece pe parcursul claselor a IX-a si a X-a, elevii de la
profilul mecanic studiază aceleaşi discipline de cultură
tehnică generală şi se pot transfera de la o specializare la
alta, întrucât din clasa a XI-a se studiază discipline specifice fiecarei
calificări.
Există, deasemeni şi posibilitatea ca din cauza mediei de admitere unii elevi să nu poată alege specializarea dorită, dar pe parcursul procesului de învăţământ să observe că doresc să continue această specializare deoarece aceasta le satisface nevoile de formare şi cunoaştere.
Grupul Scolar
Industrial ,,Stefan Procopiu’’ Vaslui
Clasele:
a-XI-a A, a-XI-a B, a-XI-a D, a-XI-a E
Specializarile: Tehnician operator tehnica de calcul;
Tehnician telecomunicatii;
Tehnician mecatronist;
Tehnician proiectant CAD.
Test de evaluare ,, ORMI’’ LLP-LdV/IVT/2010/RO/039
Subiectul I.
Încercuiţi litera corespunzatoare răspunsului corect:
1. Rolul sursei de tensiune pentru un echipament electronic este:
a) protecţie a echipamentului
b) alimentare cu energie
electrică
c) vizualizare semnal
d) amplificatore
2. Sursele de tensiune pot fi:
a) cu element regulator serie
b) cu element regulator paralel
(derivatie)
c) cu element regulator serie şi
cu element regulator paralel
d) fără element regulator
3.
După principiul de
funcţionare stabilizatoarele pot fi:
a) stabilizatoare parametrice şi stabilizatoare
în regim de comutaţie
b) stabilizatoare electronice cu reactie si stabilizatoare in regim de comutaţie
c) stabilizatoare parametrice şi stabilizatoare electronice cu reacţie
d) stabilizatoare parametrice, stabilizatoare în regim de comutaţie, stabilizatoare electronice cu reacţie
4. Rolul unui amplificator este de :
a) creştere a nivelul unui
semnal
b) reducere la nivelul de semnal
c) defazare a semnalului de
ieşire faţă de semnalul de intrare
d) defazare a semnalului de intrare
faţă de cel de ieşire
5. Un sistem robotic este constituit din
următoarele componente:
a) componente de programare(
software)
b) componente hardware(componente mecanică şi electrice)
c) componente hardware şi software(componente
mecanice , electrice şi informatice)
d) componente mecanice şi informatice
Subiectul II.
Completaţi
spaţiile libere:
1. Roboţii utilizează maini
mecanice, unelte sau alte dispozitive numite……(1)… .
2. Robotul este intruchiparea noţiunii de ,,automatizare şi control’’, este un produs……(2)….. .
3. Microprocesorul este un ……(3)….. complex, capabil de a efectua operaţii aritmetice şi logice sub controlul unui program.
4. Automatul programabil este cel mai general echipament de …...(4)……industrială cu microprocesor.
5. Componenta esenţială a unui robot este……(5)……robotului.
Subiectul III.
Realizaţi un eseu structurat respectând urmatoarea structură:
·
Definiţi
microprocesorul.
·
Prezentaţi
părţile componente ale unui microprocesor.
·
Indicaţi
rolul unităţii aritmetico-logice.
Test de evaluare privind selectia ,, ORMI’’
Barem de corectare:
Nota: Se
acordă 1 punct din oficiu.
Timp de lucru 1 ora.
Toate subiectele sunt obligatorii.
Subiectul I: 2,5 pct.
1. b
2. c
3. d
5. c
Pentru fiecare răspuns corect se acordă 0,5 pct. Pentru lipsa răspuns sau răspuns incorect se acordă 0 pct.
Subiectul II: 2,5 pct.
1. (1) – end-effectors
2. (2) – mecatronic
3. (3) – circuit integrat
4. (4) – automatizare
5. (5) – braţul
Pentru fiecare răspuns corect se acordă 0,5 pct. Pentru lipsa răspuns sau răspuns incorect se acordă 0 pct.
Subiectul III: 4 pct.
Microprocesorul este un circuit integrat complex care este capabil de a efectua operaţii aritmetice şi logice sub comanda unui program.
Pentru răspuns corect se acordă 0,5 pct. Pentru lipsa răspuns sau răspuns
incorect se acordă 0 pct.
Părţile componente ale unui microprocesor sunt:
-unitatea aritmetico-logică(UAL)
-registru
-unitatea de comandă şi control
-magistralele procesorului: de date, de adrese, de
comandă
Pentru oricare 3 răspunsuri se acordă 3 pct., cate 1 pct. pentru fiecare răspuns corect. Pentru lipsa
răspuns sau răspuns incorect se acordă 0 pct.
Unitatea aritmetico-logică (UAL) are rolul de a prelucra informaţia
prin calcule matematice şi funcţiile logice pe care le execută.
Pentru
răspuns corect se acordă 0,5 pct.
Pentru lipsa răspuns sau
răspuns incorect se acordă 0 pct.
Întâlniri din proiecte Europene





Koblenz, Germania
Imagini din Koblenz (Germania)




Imagini din Vaslui (România)






Domenii vocaţionale
Carl-Benz-Schule






Domenii vocaţionale
Grupul Şcolar Industrial „Ştefan Procopiu”






Bibliografie
|
Dick, D.,
s.a. |
Mecatronică,
manual pentru clasa a XI-a, Editura Delta Publishing House, Bucuresti, 2004. |
|
Dick, D., s.a. |
Mecatronică, îndrumar de
laborator pentru clasa a XI-a, Editura Delta Publishing House, Bucuresti,
2005 |
|
FESTO |
Festo
Didactic 2006 – 2007, www.festo-didactic.com |
|
FESTO |
Acţionări pneumatice, 2007 |
|
Măties, V., s.a. |
Tehnologie si educaţie mecatronică, Editura Todesco, Cluj –Napoca, 2001 |
|
„Robot”, Wikipedia |
The Free Encyclopedia, On-line reference: http://en.wikipedia.org/wiki/Robot#cite_note-0 Retrieved on
2009-02-13 |
|
Dictionary: Robot |
On-line reference: http://www.answers.com/topic/robot Retrieved on 2009-02-13 |
|
Research robots |
On-line reference: http://www.cs.cmu.edu/~chuck/robotpg/r3pg/ Retrieved on 2009-02-17 |
|
Terrain Adaptive Crawler Vehicles "HELIOS-I, II, TAQT Carrier" |
On-line reference: http://www-robot.mes.titech.ac.jp/robot/wheeled/helios1/helios1_e.html Retrieved on 2009-02-17 |
|
Allen, A.R. |
The Recti-Blob II: A Conformal Shape-changing Robot for Robust Locomotion Over Rough Terrain, MS Thesis, Department of Electrical Engineering and Computer Science, Massachusetts Institute of Technology, Cambridge, Massachusetts, 1997. On-line reference: http://www.ai.mit.edu/projects/leglab/robots/blob/blob.htmlRetrieved on 2009-02-17 |
|
Underwater robot moves like an helicopter |
On-line reference: http://www.primidi.com/2008/09/28.html , Retrieved on
2009-02-17 |
|
Echipa de realizare a proiectului Prof.
Apopuţoaie Mihaela - Coordonator proiect Prof.
Bacoşcă-Bică Mariana Prof. Bejenaru Maricel Prof.
Botan Ana-Cristiana Prof.
Bîrcă Silvia Prof.
Mazga Doina Ec. prof. Soroceanu Mihaela |
|

|
|
Elevii participanţi Arsene
Georgiana Gabriela Becciu
Alex Sergiu Caplat
Alexandru Ionuţ Ciubotariu
Iuliana Cârcu
Roxana Nicoleta Creţu
Andreea Lacatuş
Marian Catalin Maxim
Mădălina Georgiana Popescu
Mihaela Pricop
Florin Valentin Răşchitor
Dan Siniuc
Mădălina Gabriela Sticea
Ciprian Ungureanu
Marian |
|||
|
Partener: Foerderverein Berufsbildende Schule Technik
Koblenz e.V.
|
||||